・上一文章:无极灯的温度特性研究
・下一文章:道路照明节能措施
介绍自适应前照灯系统(Adaptive Front-lighting System ,AFS) 的产生背景、国内外发展概况;详细分析AFS 的6 种不同的照明模式:默认照明模式、高速公路照明模式、乡村照明模式、城市照明模式、弯道照明模式和恶劣天气照明模式; 就AFS 的以上功能,给出控制 电路 的硬件构成,系统由 传感器 组、传输通路、处理单元和执行机构4 部分组成。通过对AFS 的理论阐述和实践分析,为国内在AFS技术上的进一步发展探索提供参考。
引言
汽车前照灯是安全驾驶重要的一环,人们对前照灯的各方面要求越来越高,然而传统的前照灯只具有近光和远光2 种固定照明模式,不能满足客户需求。
如汽车在转弯时,由于传统前照灯的照明角度限制,存在照明暗区,会影响司机对弯道上障碍物的判断;雨天行驶时,地面的积水会反射迎面车辆前照灯的光线,造成司机眩目等。由于这些问题的存在,使得夜间发生车祸的概率是白天的2 倍。为了解决现存的这些问题,一种新的前照灯系统―――自适应前照灯系统(AFS) 被提上开发日程。该系统能够根据周边环境的变化适时自动地调整自身的配光方式,提供更适合的照明范围、照明距离和照明角度,提高驾驶的安全性及舒适度。
AFS 自 1992 年起被列为欧共体尤尼卡(EUREKA) 的 1403 号项目,欧洲的各大汽车公司和美国、日本的部分公司都参与了此项目。 2003 年,意大利玛涅蒂马瑞利车灯公司在汽车上安装了动态调节灯,为AFS 奠定了基础。法国的VALEO 也开发了自己的AFS。德国Hella 公司取得了最为丰硕的成果。目前,不少豪华汽车,诸如宝马W5 系、奔驰E级、奥迪A8、凌志R 系列等,已经加装了部分功能的AFS 系统。国内在AFS 上起步较晚,上海小糸车灯有限公司、沈阳北方汽车大灯自动转向器厂和天津欧华汽车研发中心等一些机构在进行自主研发,但还没有批量生产,也缺乏核心知识产权。由于欧美国家没有考虑到沙尘暴天气,在奇瑞公司的建议下,我们就沙尘暴天气情况下的AFS 进行了研究。
1 AFS 的功能
AFS 是一种智能式前照灯系统,它能根据周围环境的变化主动对前照灯做出调整以适应环境。下面将针对不同的环境分6 种照明模式对AFS 的功能进行详细阐述。
1. 1 默认照明模式
默认模式下,AFS 的前照灯不做任何水平与垂直方向的调整,但会根据光敏传感器感知光线的变化而自动打开或关闭前照灯。如当白天车辆穿过隧道和桥梁或遇到恶劣天气时,前照灯会自动打开以补充照明。当黄昏时分,光线强度下降到一定大小时,前照灯也会自动打开,似乎可以感知夜晚的即将到来;相反,当黎明到来,光线强度升高到一定大小时,前照灯会自动关闭。
1. 2 高速公路照明模式
当汽车在公路上行驶发现危险时,司机的第一反应就是制动,司机发现紧急情况到刹车发生制动作用的这段时间称为反应时间,反应时间内车辆以初始速度行驶的距离称为反应距离,从刹车发生制动作用直至汽车停止这段时间内车辆行驶的距离称为制动距离,反应距离和制动距离都与汽车的初始速度成正比。刹车距离为反应距离与制动距离总和,且刹车距离必须在前照灯的照明区域内才能保证汽车的安全行驶。
车辆在高速公路上行驶时,车速很快,车辆密度相对较低且侧向干扰较少,所以要求前照灯照得更远、更窄,且要求车速越高,光型越长,这样才能提前发现前方障碍物,避免交通事故的发生。当车辆进入高速公路且速度> 70km / h时,AFS 通过 车速传感器 或GPS 获知此信息,然后通过调高近光灯的水平高度予以实现。而且随着车速的加快,近光灯也会调得越高,以保证能在安全刹车距离之外发现危险。图1 为进入高速公路前后的前照灯的灯光光型分布图,从图1 中可以看出,AFS 工作时车辆的照明效果明显比未工作时好。
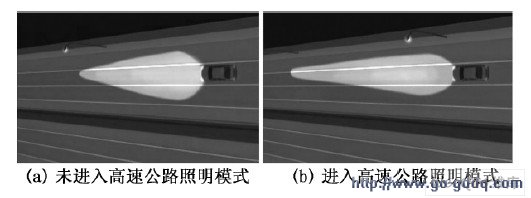
图1 AFS 高速公路模式对比图。
1. 3 乡村照明模式
乡村道路岔路口多,且光线较暗,不便及时发现边缘障碍物。部分道路还凹凸不平、起伏不定,造成车身倾斜,如图2 所示,车身倾斜对前照灯照射俯仰角度影响很大。
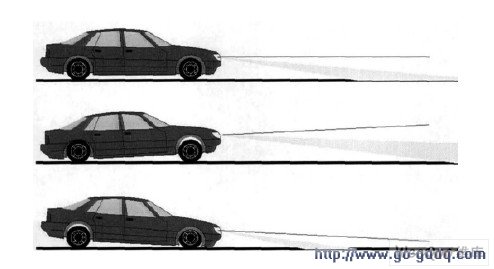
图2 车身倾斜对照明产生的影响
是否进入乡村照明模式由光敏传感器和车身高度传感器或GPS 来判断。以右行国家为例,当汽车进入乡村时,左右近光灯的驱动功率均增大,从而增加亮度以补充照明,且右灯的灯光要偏转一定角度,以照射到边缘路面,效果如图3 所示。
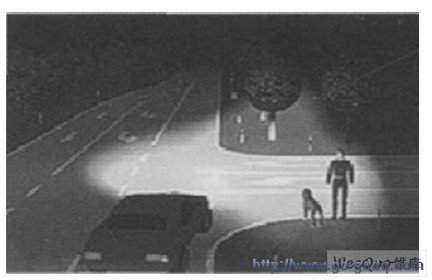
图3 AFS 乡村岔路口效果图
若遇到起伏不平的路况,则AFS 会根据前轴和后轴高度差的变化量来自动调整前照灯的投射俯仰角度,尽量使光轴回复到原先的水平状态,以能达到良好的照明效果,又不会对迎面车辆的司机造成眩目。前照灯需调整的投射俯仰角度可根据文献[5]算出。
1. 4 城市照明模式
对于城市公路来说,照明条件较好,且车流人流密度都明显增大,防止眩目就显得尤为重要。眩光分为直接眩光和反射眩光,这里主要为直接眩光。一般要求,在会车时,射向对面驾驶员的光照强度不要超过1 000cd。是否进入城市照明模式由光敏传感器和车速传感器或GPS 来进行判断。当光强达到阈值,且车速不超过60km / h时,城市道路照明模式便自动开启,左右近光灯的驱动功率均减小以降低亮度,且前照灯在垂直方向上会向下偏转一定角度,从而降低射进对面驾驶员眼中的光照强度。下图4 为进入城市前后的照明效果对比图。
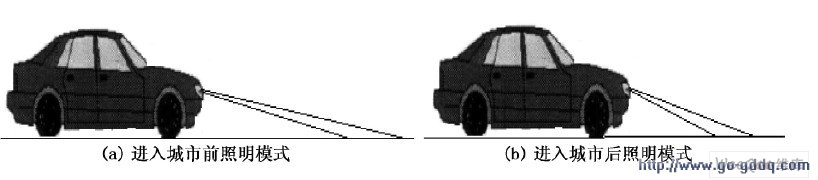
图4 AFS 城市照明模式对比图
1. 5 弯道照明模式
当汽车在弯道上行驶时,因为前照灯的光线和车辆的行驶方向一致,所以不可避免会存在照明暗区,极易因为不能及时发现弯道上的障碍物而引发交通事故。是否进入弯道照明模式由汽车的方向盘转角传感器和车速传感器或GPS 来判断。当转向角超过12°并且车速超过30km / h 时开始工作,当转向角<9°或车速< 5km / h 时停止工作。当AFS 获知车辆进入弯道时,前照灯会旋转一定角度,给弯道以足够的照明,效果对比图如图5 所示。为了正面照明的需要,AFS 并不是同时控制左右近光灯的,如果车辆向右转弯,则右灯向右侧旋转,如果向左转弯,则左灯向左侧旋转。同时,左右近光灯的最大调节角度也是不同的,对于交通法规规定靠右行驶的国家,右侧近光灯变化角度最大为5°,左侧为15°。
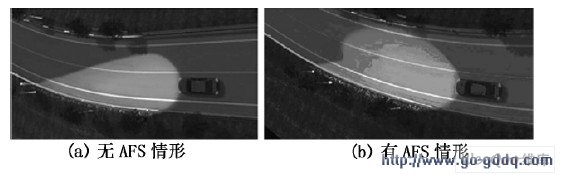
图5 AFS 弯道照明模式对比图
由1. 2 节高速公路照明模式分析可知,只有刹车距离在前照灯的照明区域内才能保证汽车的安全行驶,所以要求前照灯旋转后能照射到的弯道上的最大直线距离大于或等于刹车距离,由此不难得出前照灯需要旋转的角度φ 。如图6 所示,不难看出:

其中,x 为安全刹车距离,且x = Vt + S,V 表示初始车速,t 为反应时间,S 表示制动距离,R 表示弯道半径。
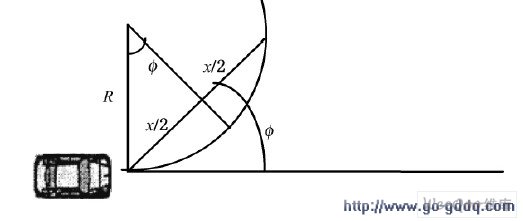
图6 前照灯旋转角度的计算
1. 6 恶劣天气照明模式
1. 6. 1 阴雨天气照明方式
阴雨天气时,地面的积水会将行驶车辆打在地面上的光线,反射至对面会车司机的眼睛中,使其眩目,如图7 所示。法国的一项民意调查表明,83% 的驾驶员认为,夜晚的反射眩光比直接眩光更令人感到不安,所以必须设法降低阴雨天气产生的反射眩光。

图7 积水反光造成眩目
由雨量传感器获得的数据即可判断当前是否下雨,并能够进一步获知雨量的大小。一般汽车前面距离为5 ~ 25m 的路面可以产生反射眩光,AFS 可根据雨量大小适当降低前照灯的高度,对此范围内的照度进行限制,从而避免反射眩光对车辆前方60m范围内的驾驶员造成眩目。
1. 6. 2 雾霾天气照明方式
雾霾天气时,前照灯光线产生漫射且前照灯上布满小水珠,使前照灯的亮度和穿透力降低,导致前方景像难以看清,司机的能见度很低,给交通带来很大不便。由雾传感器感知雾的大小和光敏传感器感知光线的强弱从而启动AFS。AFS 会提高前照灯的驱动功率和抬高前照灯的垂直高度,而且还会启动车灯清洗装置,冲洗前照灯上的小水珠,以增强前照灯光束的亮度和穿透力,从而提高前方道路的能见度与清晰度。
1. 6. 3 沙尘暴天气照明方式
沙尘暴天气和下雾天气情况类似,虽然此时不存在小水珠,但是在沙尘暴天气下会有大风,使前照灯上布满灰尘,且四周随时可能刮来不明物体。由 风速传感器 、颗粒物传感器和光敏传感器判断是否进入沙尘暴照明模式。这时,AFS 同样会提高前照灯的驱动功率和抬高前照灯的垂直高度,同时启动车灯清洗装置,洗净前照灯上的灰尘,此外,其中1 只前照灯会向外侧旋转一定角度以及时发现被风刮来的障碍物。
2 AFS 的实现方案
为了实现AFS 的功能,需要对AFS 的 光源 部分和控制部分分别进行研究。
2. 1 AFS 光源
传统的前照灯光源难以实现AFS 的全部功能,相对于传统AFS 的光源卤素灯或HID 灯, LED 明显的优势是体积小、重量轻,从而节省了非常有限的AFS 灯具内部空间,较轻的重量也减小了电机的使用功耗。此外,由于单个LED 功率太小,所以在LED前照灯的设计中,一般将很多个LED 排列起来组成1只前照灯,如图8 所示。如果对多个LED 进行不同的 开关 控制和旋转,就可实现AFS 功能模式所要求的不同光型,并且系统更加节能和可靠。福特公司的一款汽车就采用了基于LED 的AFS。这种基于LED的AFS 通过传感器采集环境信息并传至中央 控制单元 ,中央控制单元将数据处理后去控制各个角度LED 的亮度,从而使得驾驶员能够更精确地掌握前方道路等周边信息,有效提高了驾驶的安全系数。
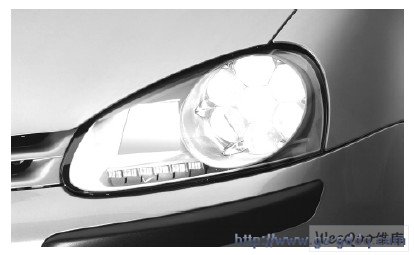
图8 用LED 作光源的AFS
2. 2 AFS 的控制方案及硬件组成
2. 2. 1 AFS 的控制方案
为了实现上述AFS 的各种照明模式,现提出如图9 所示方案。此方案中,AFS 由4 大部分组成,分别为传感器组、传输通路、处理单元和执行机构。此方案的基本思想是:中央处理器为实现汽车前照灯的自适应功能,需要首先通过传感器组采集光线、车速、转向、道路状况等信息,再由传输通路实时传输这些信息至中央处理器,中央处理器经过复杂的控制逻辑和算法,将得到的控制命令发给执行单元,再由执行单元做出最终反应,从而达到预期效果。
2. 2. 2 AFS 的硬件组成
(1) 传感器组。
传感器组包括光敏传感器、车速传感器、车身高度传感器、方向盘转角传感器、雨量传感器、雾传感器、风速传感器、颗粒物传感器、汽车 位置传感器 (GPS 信号)。
(2) 传输通路。
选择CAN( Controller Area Network) 总线 作为传输通道,CAN 总线常用于实现汽车内部控制系统与各检测和执行机构间的数据通信。通过CAN 总线还可以向其它 电子 模块索要本系统需要的相关资源及将本系统当前的一些信息发送给其他电子模块,从而简化系统结构,实现资源共享。对应于2. 2. 1 条提出的AFS 的控制方案,CAN 节点连接图如图10 所示。
(3) 处理单元及执行机构。
在原理样机中,选择 AT89S51 单片机 来控制步进电机、车灯功率 驱动芯片 和车灯 清洗器 。图11 给出了步进电机的控制示意图,本系统共需4 台步进电机,左右前照灯每边各2 台,其中1 台步进电机控制垂直方向的转动,另1 台用于控制水平方向的转动。
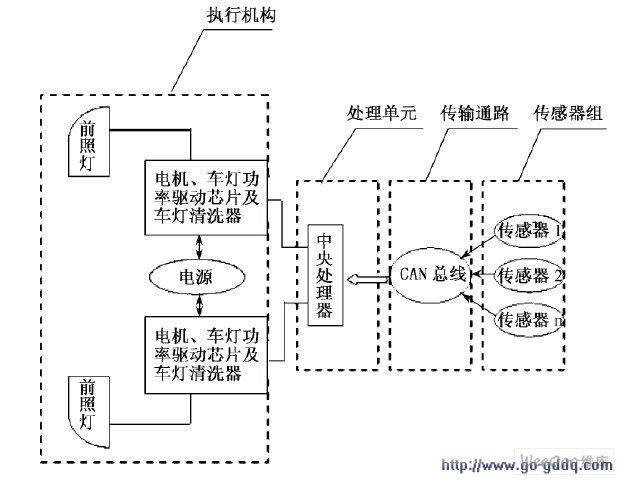
图9 AFS 的控制框图
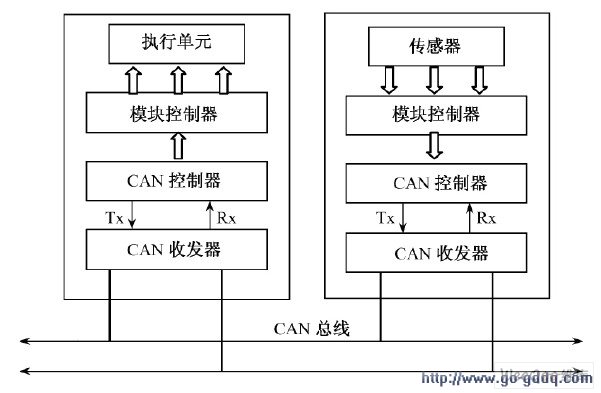
图10 CAN 节点连接图
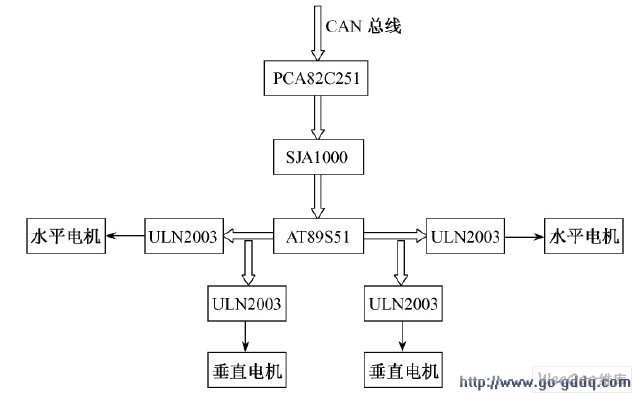
图11 步进电机控制示意图
3 结论
通过对AFS 的功能分析,提出了沙尘暴天气下的AFS 的照明功能,给出了可行的硬件实现方案。
当前的AFS 只有当车辆进入某种环境后才能根据传感器采集的相关信息对当前的驾驶环境做出判断,且只有当传感器收集的数据值在一定范围内才能做出反应,低于或高于此值AFS 将不予理睬。所以当前AFS 的及时性和可靠性有待进一步改进。本研究系统中预留了GPS 信号,通过对系统的扩展,不但对车辆所处的当前环境状况具有正确的判断,同时能对即将到来的环境状况有效地预知并提前做出反应。
它被称为预见型AFS,即P-AFS( PreDICtive-AFS)。譬如车辆在进入弯道之前,P-AFS 便能发现前方道路的状况,从而能提前开启弯道照明功能,且比传统的AFS 能更加准确地照射到弯道的中央。P-AFS 将成为我们下一步研究的主要方向。





