・上一文章:利用波形换算判断交流电压表的检波方式
・下一文章:全面认知3D视频――从技术概念到监测与测量
摘要:静止同步补偿器(STATCOM)因具有无功补偿响应速度快、连续调节范围宽等优点,已经现代电力系统中重要的补偿设备之一。对不同控制策略STATCOM的补偿效果进行研究是谊领域值得关注的关键问题。在此对STATCOM主电路进行四重化的结构优化,有效降低谐波含量,控制策略上采用电流间接控制方法,在Matlab/Simulink平台上实现了补偿系统的建模和仿真,通过比较补偿前后系统功率因数的变化,验证了所采用控制策略的正确性和有效性。
关键词:静止同步补偿器;电流间接控制;电流直接控制;柔性交流输电系统
随着工业化进程的加速,对电能质量要求也日益严格,如何提高现代电力系统可靠性、可控性、快速性已成为亟待解决的问题。静止同步补偿器(StatIC Synchronous Compensator,STATCOM)是柔性交流输电系统(FACTS)的重要设备之一,在稳定系统电压、提高功率因数、增加传送容量等方面发挥着重要的作用,代表着无功补偿技术的发展方向。STATCOM主电路架构不同、控制策略不同的对应着不同的补偿效果和成本。
1 STATCOM工作原理简述
采用STATCOM进行补偿无功具有连续调节范围大、控制响应精准快、运行经济可靠等优点。其工作原理图如图1所示。STATCOM主电路由逆变器和直流侧电容构成,经变压器接入电力系统。在理想情况下STATCOM装置等效为“可控电压源”,设其输出电压为UI,系统电压为US,两者同相位。当UI>US时,电流从系统流向STATCOM且电流相位超前系统电压90。,装置输出感性无功;反之,当UI<US时,电流从STATCOM流向系统且电流相位滞后系统电压90°,装置吸收感性无功;当UI=US时,系统与STATCOM之间的电流为0,不交换无功功率。

稳态时,STATCOM从系统吸收的有功功率和无功功率的计算公式如下:
式中:US是系统电压;R是系统等效电阻;δ是系统电压和装置输出电压之间的相位差。当δ<0,Q<0吸收容性无功;当δ>0,Q>0吸收感性无功。通过调整δ,就可对STATCOM的无功功率进行连续调节。
2 STATCOM的间接电流控制策略
根据是否直接控制输出电流来分,STATCOM可分为电流直接控制和电流间接控制两种控制策略。间接电流控制是指对STATCOM装置中逆变器所产生的交流电压基波的相位和幅值的控制,以此来间接控制STATCOM交流侧电流。间接电流控制分为单δ控制和δ与θ配合控制。采用单δ控制时,虽然简单有效,但忽略了对θ的控制,使得直流侧电容电压稳定困难、损耗增加。在δ与θ配合控制中,δ角的控制用于无功功率控制,而对θ角进行控制可起到维持电容电压稳定的作用。因此可对无功功率控制采用逆系统非线性PI方法,对STATCOM直流侧电容电压采用传统的PI控制方法,两个控制环互相独立,互不干扰。
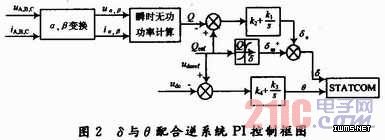
图2为δ与θ配合的逆系统PI控制框图。图中,三相瞬时电压uA,B,C和瞬时电流iA,B,C,经过α,β变换和瞬时无功功率计算得到补偿无功功率Q,并与参考补偿无功功率Qref进行比较,经过PI环节得到控制量δ,参考电压uref与直流侧电压udc进行比较,经过PI环节得到控制量θ,将控制量δ和θ作为控制参数输入STATCOM控制系统。
3 系统模型搭建及仿真结果分析
通过以上对STATCOM的原理和控制策略的分析,在此将在Matlab/Simulink环境下对其进行系统级的建模仿真。Matlab/Simulink被广泛应用于电力系统的建模和仿真中。





