・上一文章:通过开源API进行DSP视频处理
・下一文章:移动DRM技术在3G中的应用
FlexRay实现的初期功能是迈向全自动无人驾驶(或近乎全自动驾驶)的第一步。虽然最早的设想是实现汽车线控(X-by-wire)(线控驱动、线控驾驶等),然而其他发展趋势也在推动FlexRay技术的发展和应用。主要表现在生产效率、安全法规要求愈来愈高,各种舒适便利功能日趋增多。
同时,这些发展趋势也对电子控制架构和汽车网络协议性能提出了更高的要求。简单地说,将来的汽车将需要更高带宽的总线,及确保迅速响应紧急任务的确定性协议。
FlexRay的10Mbps带宽、内置容错功能和确定性正是针对这些需求而设计的。FlexRay还能够兼容多种网络拓扑,并具有可扩展性来应对新的工程挑战。
未来业界已采用了十几年的CAN和LIN总线仍能胜任自己的工作。事实上,采用FlexRay未必会对LIN应用(如雨刷和电控车窗)产生太大的影响。因为这些都仅限于局部控制,无需与汽车其余部件进行大量通信,而且只需要很低的数据带宽。
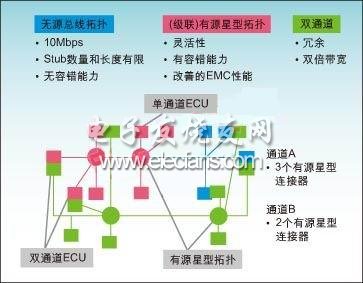
图:FlexRay的设计支持多个网络拓扑。
CAN也注定会在将来的汽车控制架构中扮演重要的角色。虽然CAN无法满足现代汽车对总带宽的要求,但灵活的工程设计至少会暂时提供符合实际的解决方案。
这些解决方案包括多个互连的CAN网络,通过划分网络来满足带宽要求,同时避免将所有数据都放在同一条总线上。这项经验证和路测的技术对CAN特别有益。在高度注重安全的汽车行业,其设计变化需要规划到将来的数十年,这确实是个优势。
宝马采用FlexRay进行减震控制就是一个很容易理解的例子,该功能本可以由CAN来实现。采用FlexRay直接替换CAN,弄清楚了新技术如何在现实生活中应用,就能明白其出众的性能。
不过逐步采用FlexRay是肯定无疑的,因为FlexRay能够全面降低复杂性,并可提供更经济有效的解决方案。从长远来看,其10Mbps带宽和内置容错功能,可以为将来的汽车提供最有效的一流解决方案。
减少复杂性,实现更多沟通
随着汽车中增强安全和舒适体验的功能越来越多,实现这些功能的电子控制单元(ECU)的数量也在持续上升。如今高端汽车有100多个ECU,如果不采用新架构,该数字可能还会增长。ECU操作和众多CAN总线之间的协调配合日益复杂,严重阻碍线控(X-by-wire)的发展。即使可以解决复杂性问题,CAN也缺乏线控所必需的确定性和容错功能。
复杂性问题已引起工程设计领域的强烈关注,不仅要简化汽车制造流程,还需降低整个子系统的成本。实现这一目标的最佳途径就是减少ECU数量。当然,这也意味着那些剩下的ECU需要提供更多的服务和拥有更强的性能。同时,由于要与其他ECU更频繁地通信,所以对网络带宽的要求更高,这对安全系统而言尤其重要。
为了使FlexRay硅开发驶入快车道,飞利浦半导体公司和飞思卡尔半导体公司已同意交换FlexRay知识产权。交换知识产权将促使这两家公司的FlexRay控制器和微控制器采用共同的FlexRay协议引擎设计,以确保FlexRay设备间的互操作性。正是这种合作将促使FlexRay技术迅速的应用到汽车当中。
灵活的架构
FlexRay在试验阶段后又将如何实施呢?图1所示为高级汽车网络拓扑中FlexRay的应用示例。
FlexRay可以应用在无源总线和星形网络拓扑结构中,也可以应用在两者的组合拓扑结构中。这两种拓扑均支持双通道ECU,这种ECU集成多个系统级功能,以节约生产成本并降低复杂性。图1所示的双通道架构提供冗余功能,并使可用带宽翻了一番。每个通道的最大数据传输率达到10Mbps。
无源总线拓扑的主要优势在于,采用设计工程师熟悉的汽车网络架构,因而有效控制成本。在需要更高带宽、更短延迟时间或确定性行为,而同时容错功能并非必需的情况下,这种无源总线拓扑非常有用。典型的应用领域就是直接替换CAN以满足带宽要求。
而使用星型拓扑却可完全解决容错问题,因为如果出现意外情况,星型的支路可以有选择的切断。如果无源总线线缆长度超过规定限制,星型拓扑还可以用作复制器。
除了其拓扑的灵活性以外,FlexRay尚有许多其他协议无法比拟的优势。它同时支持时间触发(确定性)通信和事件触发通信,如启动制动顺序(braking sequence)。
FlexRay还支持总线间的多种消息传递架构。随着FlexRay在汽车上的广泛使用以及网络日益统一,这项功能将越发重要。例如,若干家汽车制造商已经实施或提议采用一种网络架构,不管采用何种通信协议,所有通信通过一个网关实现。为了跨越协议边界通信,要求网络支持多个消息传递选项。





