・上一文章:出租车远程LED信息发布系统
・下一文章:基于能量收集器的无线电源设计
3 实验分析
本智能充电机分手动模式和自动模式两种充电方式。下面分别对其进行验证。
手动模式充电波形如图6所示,图中第一通道为电池端电压;第二通道为脉冲变压器原边的驱动信号;第三通道为模拟PI调节器的给定参考电压;第四通道为电流钳测得的实际充电电流信号。
可以看出,手动模式下,单片机能够正常地从电位器取出信号,并将其转换为相应的电压信号发送给模拟PI调节器作参考。电池端电压随充电电流波动,因此能够进行正常的手动充电。
手动模式充电波形如图7所示,充电机在电池单格大于等于2.35V时进行阶段转换,每次转换过后都将充电电流减小为上阶段充电电流的一半。
程序中设置进行三次阶段转换,第三阶段进行过充电。
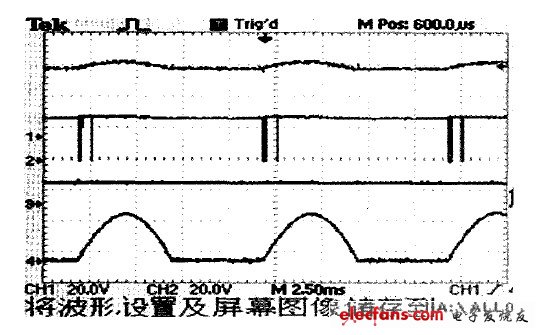
图6 手动模式充电波形
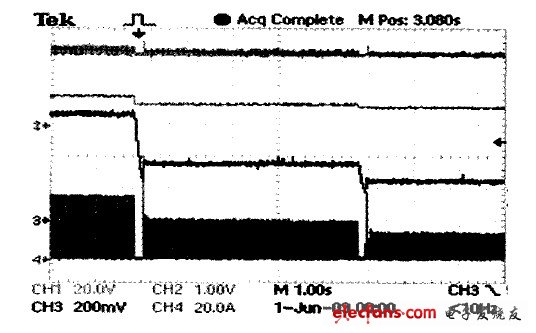
图7 自动模式充电波形
第一通道为电池端电压,第二通道为电流反馈电路经第一级放大电路之后的信号,第三通道为模拟PI调节器的给定参考电压,第四通道为电流钳测得的实际充电电流信号。从图中可以看出充电机可以正常完成三阶段恒电流充电。
4 结束语
以单片机AT90CAN32为核心的智能充电设备控制系统的硬件设计方案。采用模块化的程序设计方法设计了整个系统的软件流程,并编写了主程序和各模块的子程序,实现了数据采集、事件管理、充电控制算法和输出控制。该智能充电设备具有以下的特点:
(1)能完成多阶段恒流充电。与以前两阶段恒流充电相比,能有效的将充电电流控制在电池析气电流附近。
(2)不仅能够通过判断充电时间来完成关机,还能通过判断电池的端电压变化率来实现自动关机。
(3)可使用多种反馈来判断电池的状态,在原充电机电流反馈电路的基础上添加了电压反馈及调节电路。
(4)能自动判断电池块数并改变电压反馈比例系数。
(5)实时记录充电机的充电状态,实现充电机断电保护。
(6)具有CAN总线接口,方便扩展使用。





