・上一文章:修理开关电源厚膜集成电路技巧(三)
・下一文章:如何做到三只开关控制一盏灯
二、变频器在抓斗式起重设备中的应用
1. 系统构成
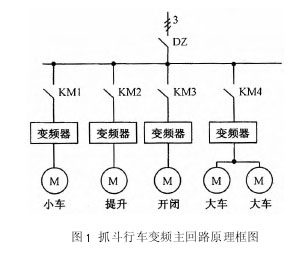
采用变频调速控制的提升机械仍可使用传统的速度控制方法,如行车的速度控制,仍使用传统的凸轮控制器,不同的档位给出了上升或下降方向的指令和多级速度指令,输入到变频器的控制端,实现方向控制和调速。而采用行车变频专用控制器可以简化控制系统设计,减少故障点。采用变频器构成的抓斗行车的主系统原理图如图 1 所示。行车控制系统采用 PLC 控制器,系统可实现重载启动、变频调速、无触点切换,提升开合 4 根钢丝绳进行速度配合,达到均匀受力、拉直运行。
2. 控制系统的主要特点
(1)控制手柄向 PLC 发出开、停、快、慢、提升、开闭指令、PLC 根据响应发出指令,控制各变频器的速度,以达到行车的最佳控制状态。
(2)在系统各变频器直流回路中设置控制单元和制动电阻,以提高系统的动态特性和可靠性。
(3)由 PLC 按控制提升、开闭机构完成行车各种工况的协调,并决定抓斗的各种工作状态。系统软件设计采用 PLC 梯形图语言来编程完成。软件编程的关键是位移负载抓斗的提升、开闭电动机检测位移量的光电旋转编码器动态偏差的实时校正及抓斗深抓、自动起升、钢丝绳受力状态自动调整等功能的实现。
行车抓斗的操作方式为单手柄联动台操作,有手动、自动两种方式可供选择。手动方式在复位调整和检修时使用,提升、开闭电动机只能单独慢档操作。自动方式在正常运行时由 PLC 控制系统协调下同时工作。
手动操作档位为:
慢开 2- 慢开 1- 零位 - 慢闭 1- 慢闭 2;
慢降 2- 慢降 1- 零位 - 慢升 1- 慢升 2。
自动操作档位为:
闭斗快降广闭斗慢降 - 零位 - 闭斗慢升 - 闭斗快升;
开斗快降 - 开斗慢降 - 零位 - 开斗慢升 - 开斗快升。
行车的小车、大车联动为单手柄操作,具有前进快、慢档,后退快、慢档及停车等功能。系统的复位调整是指对抓斗的工作基准(位置、偏差校正等)进行初始化的操作。当第一次使用系统时,行车停用时间超过一周或者滚筒非正常转动后,均需进行复位调整。如运行中发生了抓斗工作失调,则也应进行复位调整。复位操作时,只需将抓斗提到任一基准位置,按一下复位按键即可。
三、变频器在门式起重机中的应用
门式起重机(简称门机)在水电工程上被统称为闸门启闭机。它性能的好坏直接影响着各个闸门准确平稳的开启与闭合,对水电站的安全运行和河流的防汛、汇洪都起着重要的作用。传统的门机主起升机构采用绕线转子电动机串接电阻启动、制动,从而降低电动机启动电流,并实现电动机的分级调整。这种控制方式存在如下缺点:
(1)转子回路串接电阻,消耗电能,造成能源浪费;
(2)电阻分级切换,实现有级调速,设备运行不平稳,引起电气和机械冲击;
(3)再生发电时,机械能回馈电网,造成电网功率因数低,尤其在供电线路较长的应用场合,会加大变压器、供电线路等方面的投资;
(4)接触器频繁投切,电弧烧伤触点,影响接触器的使用寿命,设备维修工作量大;
(5)绕线电动机滑环存在接触不良问题,容易引起设备事故。
在门机起升机构上采用变频调速控制系统,实现了提升机械的平滑调速和节能运行,并将电网侧功率因数提高到 0.95 以上,同时省去了调速接触器、正 /反转接触器等元器件,完全解决了传统提升机械存在的固有缺陷,使设备性能得到极大提高。
①变频器的选择
提升机械常用的电动机为 YZ 系列鼠笼式电动机。YZ 系列鼠笼式电动机是以工作制 S3 及负载持续率40%的定额作为基准定额的。其过载力矩一般为2.2~2.8 倍,故为了充分发挥电动机的负载能力,提高起重设备的安全性能,必须保证变频器具有 2.2~2.8 倍的过载能力。
由于普通变频器的过载能力一般为 150%/min,瞬态过载力矩只能达到 180%~200%,因此必须提高系统所配置变频器的容量,以便提高变频调速系统的瞬时过载能力。
起升机构平均启动转矩通常为额定转矩值的1.3~1.6 倍,考虑到电源电压波动及需要通过 125%超载试验要求等因素,其最大转矩必须是负载转矩的1.8~2.0 倍,以确保安全使用。由于各厂家生产的变频器过载能力各不相同,且在高原地区还应考虑海拔高度对电动机及变频器的影响,因此门式起重机的变频器容量可按下式进行计算,即:

式中,η 为电动机效率;
Gt为总起升重量,t;
nN为额定起升速度,m/min;
cosφ为电动机的功率因数;
PCN为变频器容量,kVA;
ηm为机械效率;
Ps为起升机构所需的净功率;
k2为变频器过载系数。





