・上一文章:北京现代悦动发动机故障灯亮
・下一文章:宝马HP-19E自动变速器油道孔位置图
摩擦圆的基本原理就是力的平行四边形,这些力的侧导向力S,制动及驱动力B,及合力G。只要总力在这个圆内,车辆就处于稳定状态。如果总力超出此圆的范围,车辆就处于不可控制的状态。
这些力之间的关系是:
①使制动力和侧导向力的合力处于圆内,这时车辆可自由转向;
②增大制动力,侧导向力就变小了;
③合力等于制动力,这时车轮就抱死了,由于无侧导向力,车辆就处于无法控制状态。
驱动力与侧导向力之间也存在此类似情况。当驱动力都用上的时候,侧导向力就变为零了,这时驱动轮就开始打滑空转了。
调节过程:
ESP可以克服控制过度及控制不足。但ESP还应保证在不直干涉转向器的情况下引起方向改变。
为了能让ESP在紧急时刻作出反应,它必须弄清楚两个问题:驾驶员的转向意图和车要往哪开。
ESP接收到来自转向角度传感器及车轮速度传感器的信号来识别驾驶员的操控意图;ESP接收偏转率和横向加速度值来辨别车辆的行驶方向。
系统由接收的信号产生了两个结果,根据这两个结果,ESP可推算出是否出现了紧急情况及是否应开始工作。
有两种紧急情况:
①车辆处于控制不足状态,通过内侧后制动器的相应动作及发动机和变速器管理系统协调工作,ESP可防止脱离弯道。
②车辆处于控制过度状态,通过外侧前制动器的相应动作及发动机和变速器管理系统的协调工作,ESP可防止侧滑。
车辆在试图躲避障碍物时,ESP根据传感器传来的数据判断出现在是不稳定状态,并计算出应对措施。ESP对左后车轮实施制动,于是车的转动得到了加强,前车轮的侧导向力仍保持着。
当车辆左转弯行驶时,驾驶员向右转向,为加强这个反转向,右前轮被制动。后车轮可自由旋转,以保证在后桥产生最佳侧向力。
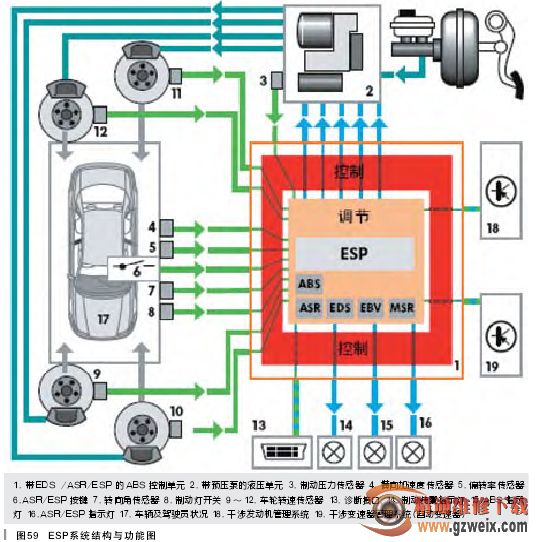
这种轮迹变化导致车绕垂直轴线的转动,这避免车甩尾,左前轮被制动。在特别紧急的情况下,制动可将车轮抱得很死,以便能限制前桥侧向力的形成(摩擦圆),如图59所示。
车辆的不稳定状态得到校正以后,ESP结束了其调节工作。
转速传感器不断地发送各车轮的转速信号。转向角传感器将数据直接通过CAN总线传给控制单元,控制单元根据这两种信息计算出车辆规定的转向及行驶特性。横向加速度传感器向控制单元发送车辆侧滑的信息;偏转率传感器向控制单元发送车辆离心趋势信息。控制单元根据这两种信息计算出车辆的实际状态。如果规定值与实际值有偏差,那么就需要调节了。
")
")
")
")

