・上一文章:研制基于车联网的智能车载终端
・下一文章:雪佛兰科鲁兹发动机转速表突然回到零位
2 纯电动汽车CAN网络设计
2.1 节点设计
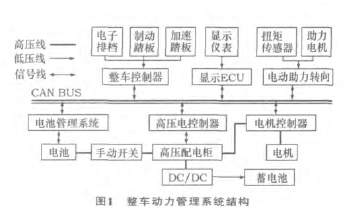
本纯电动汽车的整车动力系统由锂电池与电机组成。 另外, 为确保动力系统正常工作, 相应的管理系统是必不可少的, 如电池管理系统 (BMS)、电机控制器、 整车控制器等, 整个CAN网络的结构见图1。 本车CAN网络节点有6个, 分别为整车控制器 (VCU)、 显示ECU (DISPLAY)、 电池管理系统(BMS)、 电机控制器 (MOTORMANAGE)、 高压电控制器 (HIGHVOLTAGE) 及电动助力转向系统(EPS)。
2.2 CAN网络设计
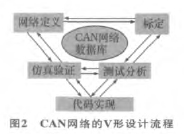
在 汽 车CAN网络开发领域, 有人提出过V形设计流程, 如图2所示。 与传统单一方向的流程相比, 该流程的特点是每个过程可以指向下一过程, 也可返回上一过程, 甚至指向其它过程。 这种指向与返回是以CAN网络数据库为核心内容的, 所有过程都是为了最优化该数据库。
2.2.1 网络定义
在网络定义阶段, 我们首先需要对整车需求进行分析, 整合需要进行CAN通信的资源分配。 一般方法是首先确定CAN网络结构, 然后对每个节点的地址、 收发信号、 报文等进行定义。
由于节点数量较少, 无网关, 因此网络结构简单, 所有节点直接挂在总线上。 物理传输使用屏蔽双绞线, 终端电阻120 Ω, 分别在整车控制器及电机控制器内。 使用29位标识符的扩展帧格式, 速率250 kb/s。
按照各节点优先级, 节点地址分配见表1。

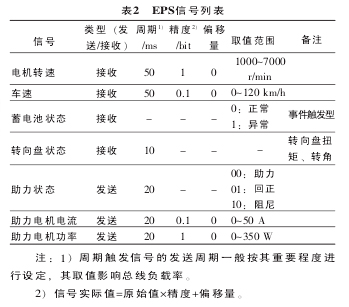
节点地址分配完成后, 需要对网络上各个节点发送的信号及报文参数进行定义。 表2举例列出了电动助力转向系统 (EPS) 的信号相关参数。
以上工作完成后, 再结合整车控制策略编写应用层协议。 此时的设计工作需要落实到每个报文的数据域字节定义。
")
")
")
")

