・上一文章:申花XQB30-3T型微电脑控制式全自动洗衣机不工作且指示灯也不亮
・下一文章:分析及诊断汽车发动机怠速不稳故障现象
在符合条件时QO.3命令通过Aclth实数寄存器输出实数控制离合伺服电机运动到位,啮合到位信号END2结束 POSO RUN对电机的控制,伺服电机应具有具有断信号、断电保位功能。
本段AcIth寄存器与下述两个Aclth公用一个寄存器,通过D/A转换模块输出4 -20mA,1--5 VDC,pulse等标准工程量控制离合伺服电机。
本段主要用于非起车阶段及车速大于X0.1的换挡动作。
本段用于起车及低速时的离合器啮合速度曲线的控制。VB388存储的包络表主要包括啮合速度较快而时间较短的第一段、速度较慢而时间较长的第二段,以及速度较快而时间较短的第三段,总的啮合时间约2-8s,根据车辆起动时及低速(<X0.1蠕动)时所需动力性能和平稳性取舍时间长短。
较长时间的半联动产生液力藕合效应,使起车平稳,不易熄火。
通过变量QXBLD用户可选择半联动或全联动起车。
通过变量DSRD用户可选择低速蠕动或低速全联动。
2.3回路PID控制方案及计算机程序
在自动、手动模式调节,loop2用于克服踏板给油与loop I -PID调节输出给油切换衔接时的偏差,从而克服人为的顿挫感,即在换挡完并不马上将油门切换为“脚动”,而是用PID调节节气门使供油量跟踪并平稳尽快地与油门踏板行程对应的供油量相同,在达到误差限值后将节气门控制权交由手动,注意此PID参数设置应该取消微分调节,比例带设定1,积分时间适中,尽量使节气门开度按单值斜率曲线尽快接近油门踏板行程对应的节气门开度,避免供油震荡,以使换挡平顺,这个调节时间主要取决于司机对油门的操控程度,如果换挡后油门踏板抖动比较激烈,这个时间就会比较长,但这个没关系,因为已经换挡完毕,不存在动力不足问题,这个环路PID的存在相当于滤波器(稳压器),平滑、优化了踏板供油的阶跃、抖动等的扰动,不存在换挡延时与动力流失的概念。
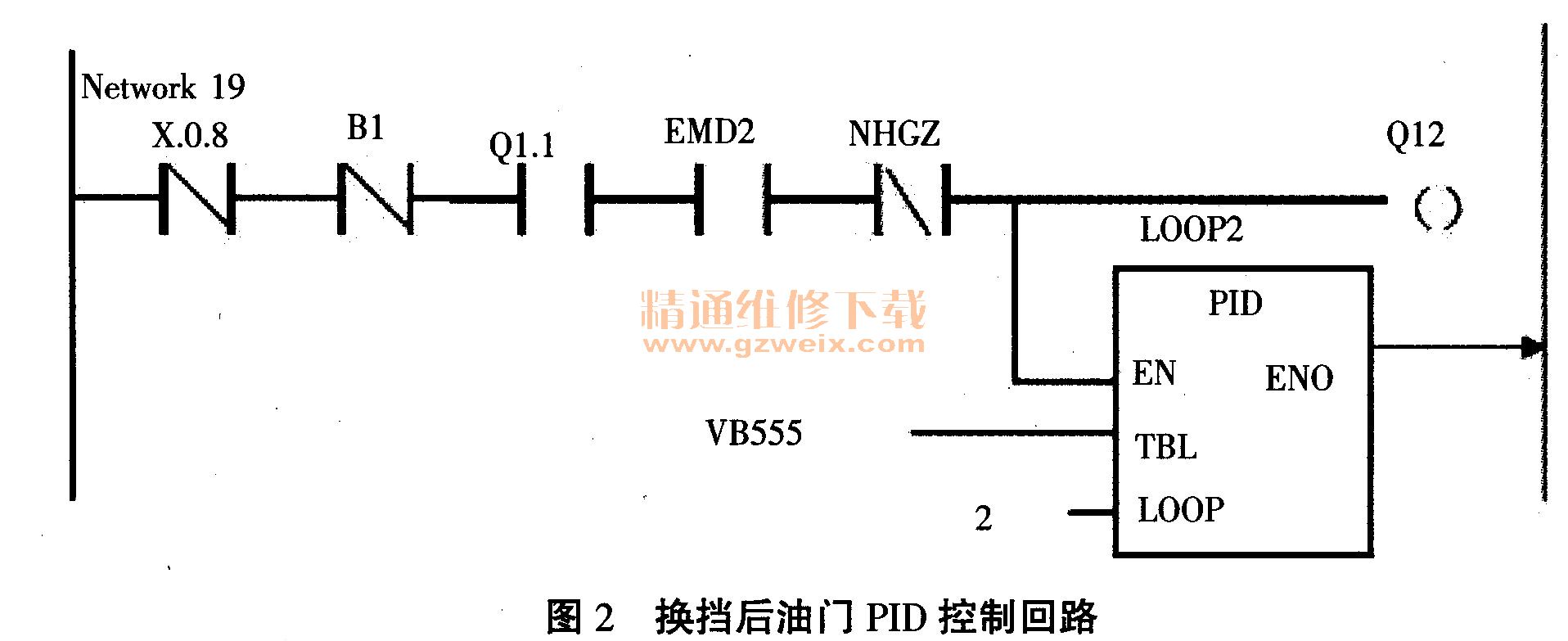
图2为换挡后油门PID控制回路,该回路设定值为油门踏板行程电阻值Rfuel对应的供油量Ls,过程量PV为实际供油量Lp,通过测量得到,在loop 1调节完毕马上介入,其输出M2用于调节节气门。
当然变速比的变化同样的油门车速将发生变化,发动机转速与供油量单值递增关系,某些段落的特性曲线接近线性,所以在向高挡位换挡时应当收点油,在向低挡位换挡时应该加点油,低挡位多点、高挡位少点(变速比落差大小不同),无论自动手动换挡,都不应该怠速,与没换挡时的加减速一样操作油门即可,性能可直逼AT,CVT,换挡将相当平顺,实际无论自动手动模式,换挡时油门是由PID控制的,保持加油姿势并非真加油,只是感觉并保持供油量以减少顿挫感。实际即使纯手动挡MT按此操作油门,如果把握得好,同样可以克服换挡顿挫感。
3.人机对话HMI设计理念
本装置设有用户维护(参数设置)人机接口HMI子程序,在驾驶室设置触摸屏,或与导航仪等设备共用,在任何时候可输入密码对以下参数进行设置:密码修改,起车半联动与全联动选择,低速制动强制分断离合车速设值,低速蠕动功能选择,起车选挡及起车后挡位强制在4,5挡使能及其强制锁定时间设定,换挡车速及其确认时间设置,换挡车速同步PID使能,啮合跟踪PID使能,供油稳压滤波PID使能,自动跳挡选择及其加速度阂值以及供油加速度阑值设定,跳高挡或跳低挡后挡位锁定时间设置,停车挂空挡时间设置,手动开关起车选择,恢复出厂值;即时生效即时运行,重新启动微机将读取上次设置参量。
4.手自一体的手动变速杆
图3为本装置的莲花换挡手柄,端部3-4个莲花瓣式微动电气离合开关形成半封闭壳体覆盖手柄上端,调节微动开关的动作力度,使之适手、不误动、不惰动;此开关用于换挡和模式切换,在计算机程序中使用其逻辑“或”信号,具有脉冲保持功能,直到分断或啮合到位为止,并可相互闭锁,在无低速强制分断离合信号时手动模式下按下开关离合分断,松开离合啮合,在换挡过程中离合器将无法啮合,自动状态下可换挡但不能操纵离合;

该变速杆形态、功能及其手动状态下的操作与手动挡一样,在自动状态失去换挡功能,手柄以硬质弹簧与变速叉连接,以防快速换挡时伤人,此功能由电磁铁、卡铁等构成,并由计算机完成操控。
三、重大意义
全新的设计思想,突破传统思想束缚与习惯势力影响,在继承了齿轮变速器的优越动力性能基础上,保障了生命财产的安全,实现了无级变速,一辆车,等于多辆各挡次车,任意设置其动力性能,使驾驶成为一种乐趣,一种体育项目,一种时尚,一种人生设计,不再是一种风险,一种劳动,一种颠簸,一种烦躁。实现了汽车设计的概念性突破,具有高端制造的划时代意义,是当代创新型汽车制造、计算机软件设计的典型代表。
")
")
")
")

