该传感器采用双传感器结构,因此可在出现故障时提高使用效率。如果在运行过程中识别出2个传感器信号的偏差超过允许限值,系统就会根据2个传感器信号中更可靠的信号继续计算并确保整个
EPS功能正常运行。如果直到行驶循环结束时仍存在故障状态,就会产生1条故障代码存储记录,并且在下次开始行驶循环时
EPS不再运行。
2.
EPS控制单元
EPS控制单元如图4所示。除电子控制装置外,
EPS控制单元还带有控制电机的供电电子装置,供电电子装置包括1个断路继电器,借助该继电器可在出现故障时使电机绕组电路断路。

电路断路时电机轴可自由转动,即可以防止出现电机电动卡止的故障情况。在控制单元内集成有1个温度传感器,该传感器用于识别电机过载情况。
3.带有电机位置传感器的电机
电机的主要任务是产生
EPS控制单元计算的力矩。电机采用无电刷式直流电机。虽然电机用直流电来驱动,但其工作原理以交流同步电机为基础。
EPS控制单元的供电电子装置将供电电压(直流电压)转化为相电压,以便在电机相绕组上产生一个旋转磁场。
根据需要控制电机是促使
EPS车辆耗油量比液压转向助力车辆大约降低0.2L/100km的主要原因。而以往用于持续驱动转向助力泵的功率现在则几乎完全用于驱动车辆。根据具体情况,可以获得最高2kW的纵向动力。
另一个重要的结构元件虽然安装在
EPS控制单元的印刷电路板上,但其紧靠在电机轴旁:电机位置传感器。这样,电机位置传感器可向
EPS控制单元发送有关电机转子准确位置的信息。由于电机通过减速器与齿条固定相连,因此
EPS控制单元可根据电机转子位置确定车轮位置和转向角。
通过
转向角传感器信号校正过一次直线行驶位置后,
EPS控制单元(例如“方向盘主动回位”)就会利用电机位置传感器信号。因为电机位置传感器信号的分辨率很高。
电机位置传感器的测量原理与转向力矩传感器相同。这2种传感器都由霍尔传感器元件组成,霍尔传感器元件与转动的磁轮相邻。转向力矩传感器设计用于探测较小的扭转角度,而电机位置传感器设计用于探测较大的扭转角度。电机位置传感器也采用双传感器结构,但2个传感器的分辨率不同,以便能够有效探测出快速和缓慢的移动情况。
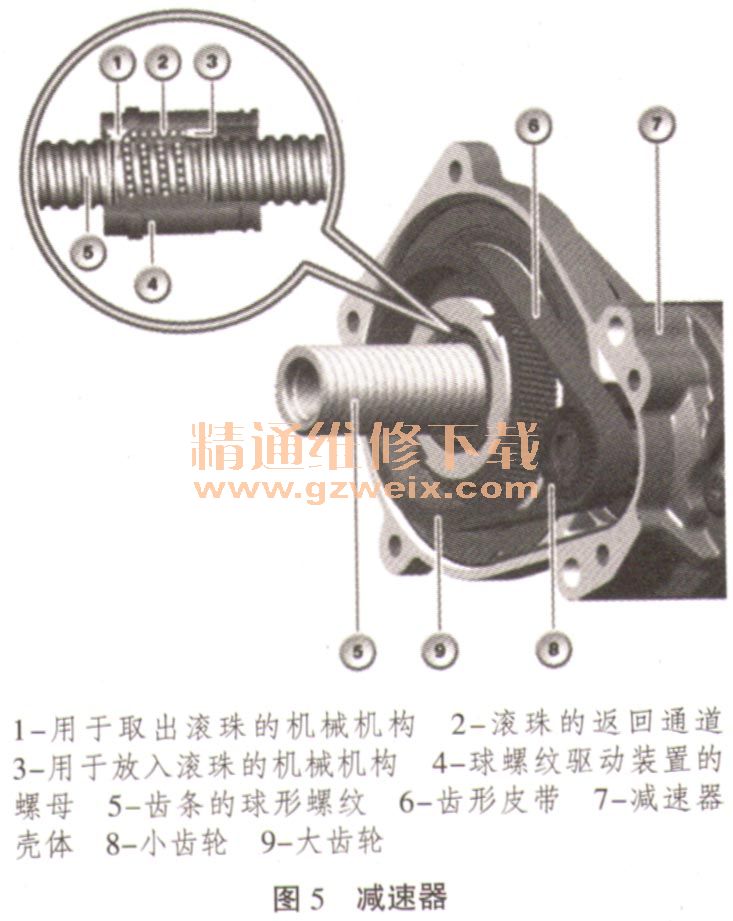
4.减速器
减速器将电机产生的扭矩传输到齿条和前车轮上,使得总传动比大约为电机转动20圈时方向盘转动1圈。这种大传动比结合电机的高扭矩可产生所需的转向横拉杆作用力。这种大传动比结合电机的转动质量还能对路面和车轮的干扰起到缓冲作用。减速器由2个子单元组成:齿形皮带传动机构;球螺纹驱动装置。
如图5所示,电机轴直接驱动齿形皮带传动机构的小齿轮8通过齿形皮带6和大齿轮9,使球螺纹驱动装置的螺母4进行转动。该螺母带有1个滚珠返回通道2,在通道两端分别有1个向齿条的球形螺纹5放入滚珠的机械机构3和从中取出滚珠的机械机构1。因此滚珠在1个封闭的“循环回路”内移动。由于螺母无法沿齿条方向移动,因此在球形螺纹内移动的滚珠会向齿条施加1个纵向方向的作用力。
减速器与电机固定连接在一起,无法对其单个部件进行维修和调整工作。减速器及其部件(以及齿形皮带)的设计使用期限与车辆使用寿命相等。如果齿条端部的防尘套损坏,水可能会进入减速器壳体内继而进入转向器内。水会造成部件腐蚀,长时间会在车辆转向时发出较大噪音。但在出现这种情况时
EPS仍会提供转向助力。
为了防止转向器内积水过多(例如涉水行驶后),在减速器最深的部位装有1个排水阀。
5.齿轮齿条式转向器
EPS转向系统的齿轮齿条式转向器功能与液压
转向系统的齿轮齿条式转向器相同。齿轮齿条式转向器将驾驶员的转向要求以及
EPS的助力力矩转化为施加给转向横拉杆的作用力,最终促使前车轮转动方向。因此同车型无论车辆安装哪种
转向系统,转向器总传动比都相同。
上一页 [1] [2] [3] 下一页
")
")
")
")

