・上一文章:制动灯评价研究
・下一文章:手动近光灯高度调节开关设计
摘要:本文从需求分析、方案设计、仿真分析、测试和验证4个方面阐述和总结某乘用车CAN总线网络的设计和验证方法。
随着汽车电子技术的发展,人们对乘用车的动力性、经济性、安全性、舒适性等方面提出了越来越高的要求,乘用车上电控单元的数量不断增加,而且功能也越来越复杂,实现这些功能需要各个控制单元之间信息共享,高效可靠地协同工作。乘用车上各个控制单元通过总线相互连接,构成了汽车的总线网络。
在乘用车的总线网络中,控制器局域网(Controller Area Network,以下简称CAN)因其技术成熟、安全可靠、成本适中,适合汽车上控制器之间网络通信,而得到了广泛的应用和普及川。ISO 11898 CAN总线技术规范对总线的物理层和数据链路层做了规定,形成了国际标准,但由于乘用车CAN总线应用层协议没有统一的标准,各个乘用车制造厂都需要自行制定各自的应用层协议。因此如何设计和验证乘用车CAN总线网络,成为各个乘用车制造厂需要解决的课题。
本文所述的目标车型为全新开发的乘用车车型,电子电器配置较为丰富,除基本的发动机控制器、自动变速器控制器、车身电子稳定系统、安全气囊控制器、电子转向系统、车身控制模块、仪表盘一、信息娱乐系统、空调控制器外,还配置了一些安全、舒适、智能的装备,如胎压监测系统、电子驻车系统、车窗自动升降系统、智能进人系统等。其中,安全气囊控制器采用K线诊断,不参与CAN总线通信;车窗自动升降系统采用LIN线与车身控制模块通信;其余控制器或系统都采用CAN总线通信。
1 CAN总线网络需求分析
CAN总线网络设计前,需要调查CAN总线上有哪些控制器节点,这些控制器节点需要发送或接收哪些总线报文。
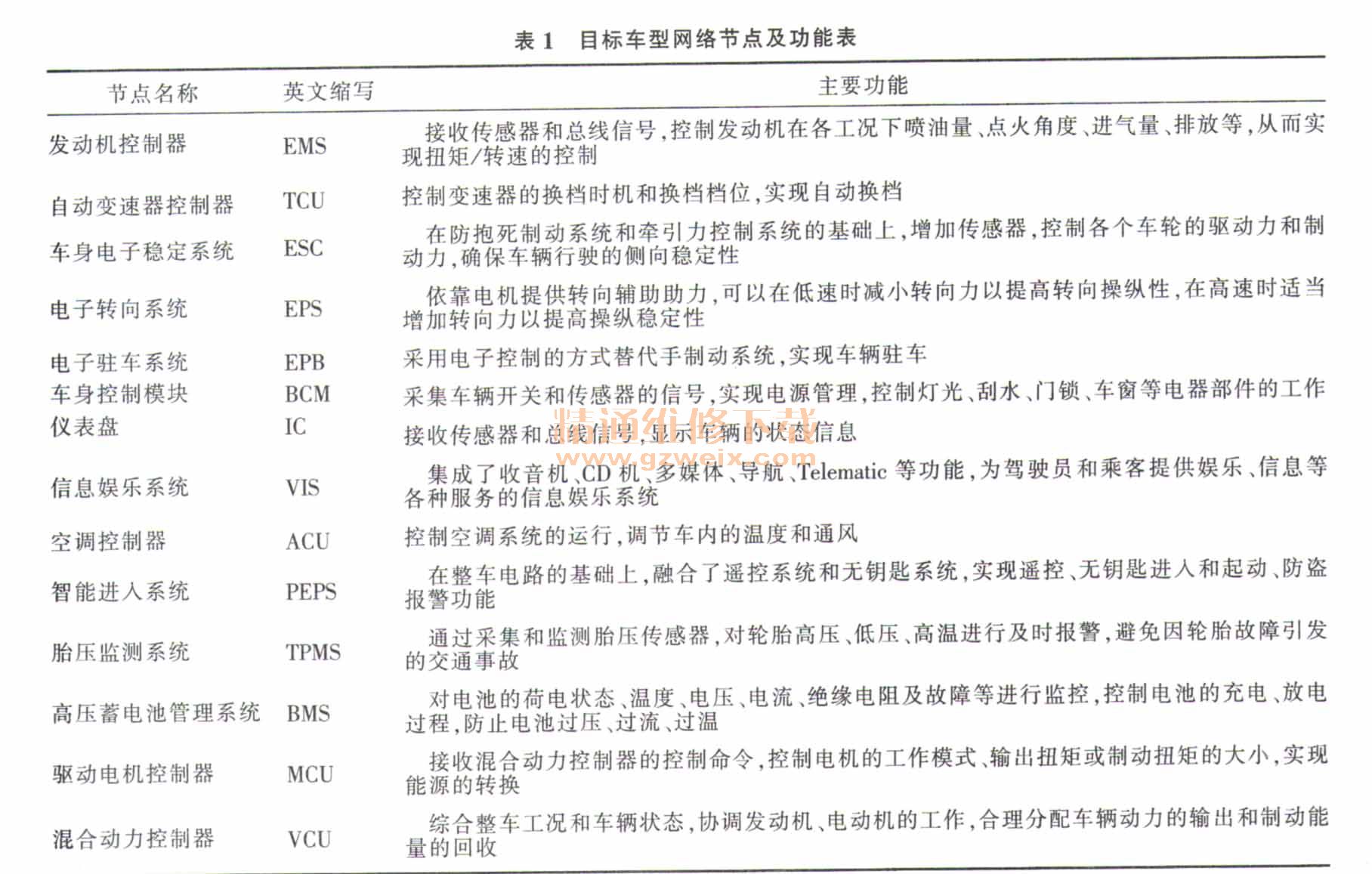
通过调查,目标车型存在以下CAN总线节点:发动机控制器、自动变速器控制器、车身电子稳定系统、电子转向系统、电子驻车系统、车身控制模块、仪表盘、信息娱乐系统、空调控制器、智能进人系统、胎压监测系统。在目标车型的基础上,还可能开发混合动力车型,需要增加高压蓄电池管理系统、驱动电机控制器、混合动力控制器等节点。以上控制器节点的主要功能见表1。
网络信号需求通常由网络节点设计人员提出,由网络架构设计人员负责收集和整理。但有时会出现信号有节点需要接收,但没有节点发送的情况,这时需要网络架构设计人员通盘考虑,协调各方,指定这些信号由哪个节点负责采集和发送。经过整理,目标车型的网络信号需求见表2。

2 CAN总线网络方案设计
2.1通信速率的选择
CAN总线协议具有高速CAN和低速CAN两个国际标准,分别是IS011898 -2和IS011898 -3。其中11898-2是高速CAN通信标准,通信速率为125 kb/s~1 Mb/s,总线最大长度为40 m/ 1Mb/s ,适用于汽车实时控制系统,尤其是发动机、变速器、制动等系统的控制。11898-3为低速CAN通信标准,通信速率为40~125 kb/s,总线最大长度为1 km/40 kb/s [3],适用于实时性要求不高的系统,如仪表显示信息、车门控制、空调控制、传感器信息、故障诊断等系统,用于车辆状态信息和控制命令的传输和共享。11898-2和11898-3协议数据链路层没什么不同,但在物理层有些区别,因此高速和低速CAN节点不能在同一个网络中使用。
在CAN总线最初引用到车辆时,多用于传输开关和传感器状态信息、仪表显示信息、灯光和防盗控制等信息,由于传输信息量不多,对网络速率要求不高,故选择低速网络,以降低成本。随着CAN总线在汽车上的广泛应用,尤其是在动力控制系统的应用,对网络速率有一定的要求,因此选择高速网络进行动力控制系统的通信 [4]。由于低速网络不能与高速网络相兼容,故在网络设计时需要优先确定网络的通信速率。500 kb/s的通信速率不仅能满足动力控制系统的需要,还可以兼顾车身信息通信的需要,故为多数乘用车制造厂家采用,而且可以方便灵活地设计CAN总线结构,即在总线节点少、总线负载率低时,采用单网段的结构,在总线节点多、总线负载率高时,采用多网段的结构。
根据以上分析,目标车型所有CAN节点的通信速率采用500 kb/s 。
")
")
")
")

