4.摄像头
摄像头是实现众多预警、识别类ADAS功能的基础。像自动紧急刹车(AEB)、车道偏离预警(LDW)、车道保持(LKA)、行人警示(PCW)、自动泊车(AP)、疲劳驾驶预警(DFM)、交通标志识别(TSR)、交通信号灯识别(TLR)等都需要建立在图像识别的基础上,进而实现车道线障碍物以及行人检测。
目前前视摄像头ADAS系统有单目和双目两种方案,两者的共同点都是通过摄像头采集图像数据,然后从图像数据上得到距离信息。因为前视摄像头最重要的一个作用就是碰撞预警,而碰撞预警需要测量距离的变化。
单目视觉的测距原理是先通过图像匹配进行目标识别,识别行人、物体、车型等。再通过目标在图像中的大小去估算目标距离。这种方法是建立在精准识别基础上的,所以首先需要建立并不断维护一个庞大的样本特征数据库,保证这个数据库包含待识别目标的全部特征数据。比如在一些特殊地区,为了专门检测大型动物,必须先行建立大型动物的数据库;而对于另外某些区域存在一些非常规车型,也要先将这些车型的特征数据加入到数据库中。如果缺乏识别目标的特征,就会导致系统无法对车型、物体、障碍物进行识别,从而也就无法准确估算这些目标的距离。导致ADAS系统的漏报。
如图16所示,双目视觉是通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目视觉的原理与人眼类似,利用双目三角测距的原理,能非常精准的测量物体的距离。
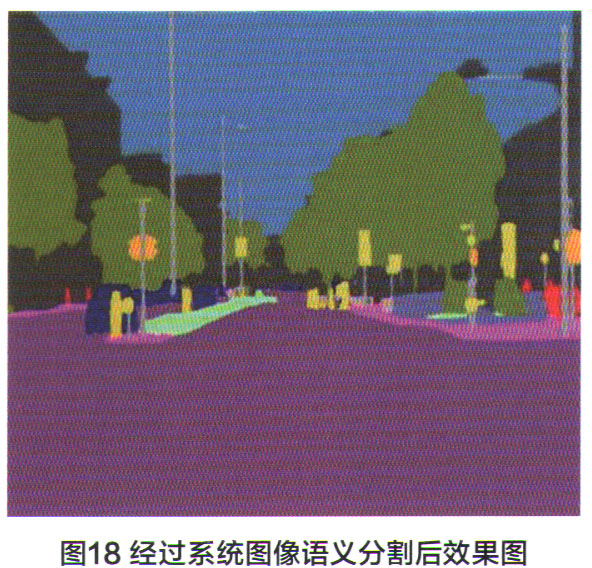
如图17、18所示,双目方案也同时兼具单目方案的功能,可以采用其中一路来进行图像识别,从而判断交通标示和障碍物类型。双目摄像头方案的优越性使得双目逐渐成为中高端车型的标配,如奔驰2016款全系(S系、E系、C系)、宝马2016款全系(7系、5系、3系)标配双目摄像头。
此外汽车上还可以配备更多摄像头来实现更多功能。如图19所示,如同时配备广角相机和中长焦相机,可以识别不同距离,不同视角范围内的障碍物;同时配备可见光相机和远红外相机,可以实现夜间使用的;在车的前、后、左、右安装四个广角摄像头,经过摄像头参数校正、镜头扭曲校正、鸟瞰视角转换、白平衡匹配和图像缝合处理,可以在车内显示器上显示一个可直观监视车辆周围环境的全景鸟瞰画面,能有效减少盲区,提高安全性。
各种传感器各有优缺点(表2),所以一般采取两种或两种以上的传感器进行搭配,实现不同的系统功能的准确感知。
关键词:




")
")
")
")

