・上一文章:智能型电缆测试系统的设计与实现
・下一文章:电容感应式触摸按键方案在电磁炉中的应用
摘要:为了实现对侦察雷达多部天线的计算机控制,天线控制系统采用了基于CAN总线的系统结构。基于对天线方位信号数字化原理的分析,设计了位置随动旋转编码器接口电路,给出了天线控制系统的PID控制算法,通过调整PID参数,较好地控制了天线的转动,简化了天线控制系统的结构,实现了一个控制台对多部天线的控制。
关键词:CAN总线;天线方位;方位信号;PID控制
O 引言
雷达侦察设备由于要对从几百兆赫至几十吉赫的频段进行侦察接收,为了保证天线的电气特性,同时便于跟踪不同波段的多个目标,往往采用多部天线。以往对天线的控制多采用相互独立的方式,每一部天线有对应的一套控制系统,其结果不仅是设备量大,故障率高,而且操作起来也不方便。为了简化对多部天线的控制,可以利用CAN总线的优势。CAN(Controller Area Network)总线为多主总线,具有点对点,一点对多点通信的功能,它采用非破坏性总线仲裁技术,可以根据总线上不同节点的优先级高(低)安排数据的传输次序,节省了总线仲裁时间,通信距离最远可达10 km(5 Kb/s),通讯速率最高可达1 Mb/s(40 m)。此外,CAN协议能够对通信数据进行编码,使得网络内的实际节点数可达100个以上。某雷达侦察设备中共有六部天线,对应于六个不同的波段,每部天线作为一个节点,操作台作为上位节点,通过设计灵活地控制软件,完成对各天线扫描方式、扫描速度及扫描范围的设定及PID控制。
1 CAN总线多夫线控制系统的组成
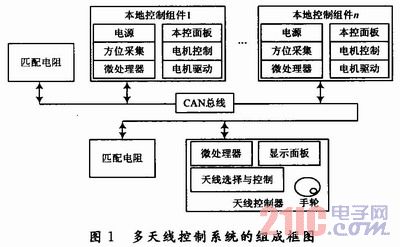
多天线控制系统由本地控制组件、CAN总线和天线控制器组成,如图1所示。其中本地控制组件包括本控面板、电源、微处理器和电机驱动电路,负责天线的位置信息采集和电机控制算法的实现;CAN总线采用CAN 2.0B标准协议进行数据传输,接口芯片采用SJA1000,完成物理链路层和数据链路层两层功能;天线控制器包括显示面板、控制按键、手轮、微处理器等,用于接收用户操作指令,显示指定天线的状态和控制天线的运动方式。
在由CAN总线构成的天线控制系统中,天线控制器和本地控制组件各分配一个固定的CAN网络地址,天线控制器通过面板选择所要控制的天线编号,将该天线的工作方式(扇扫、环扫、手动)、工作参数(扇扫边界、扫描速度)等发送到所选天线的本地控制组件,再由本地控制组件根据天线控制器给出的控制算法,实现对天线的控制,并将天线的当前参数(方位、转速、转向)通过CAN总线传送到天线控制器上显示。手动方式时,所选天线的本地控制组件根据天线控制器手轮的控制信息和跟随算法,实现对天线的手动位置控制。





