・上一文章:家庭用电故障的查找
・下一文章:分布式电源接入对配电网的影响及应对措施
太阳能追踪系统是保持太阳能电池板随时正对太阳,让太阳光的光线始终垂直照射太阳能电池板的装置。利用该系统,能够显著提高光伏发电设备的发电效率。本文现对太阳能追踪系统的设计进行简要介绍。
1 太阳能追踪系统的基础数据
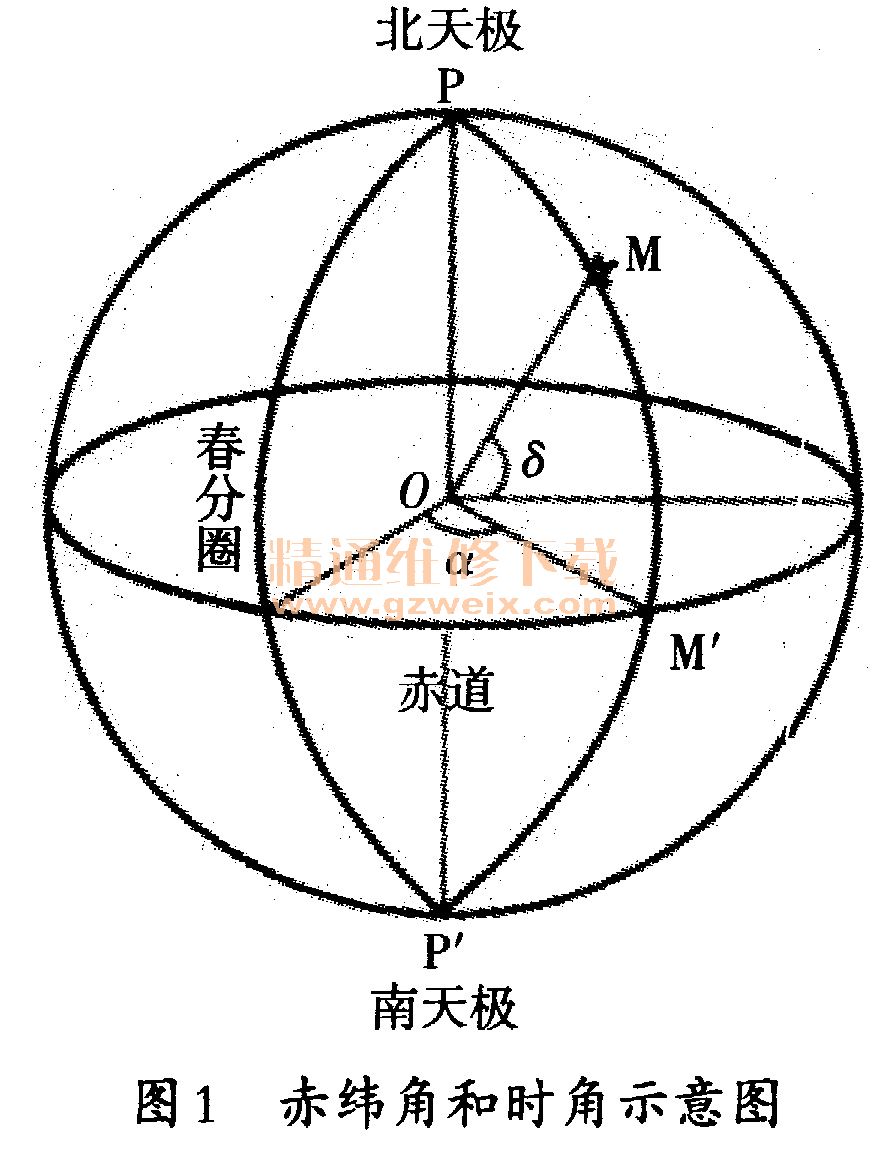
太阳光照射地面的角度与地球的运动轨迹有着直接的关系,太阳照射的角度是太阳能追踪系统运行的最基本数据。地球每天自转1周,每365天围绕太阳公转1周,太阳光线与地球赤道面所夹的圆心角,即为太阳赤纬角S,赤纬角变化范围为±23°27'。太阳所在的时圈与通过春分点的时圈(春分圈)构成的夹角为时角a,每小时的时角为15°,如图1所示。
不同纬度的地球地面上,太阳光线与地面之间的夹角称为高度角H,可以根据光伏发电设备所在地理纬度ψ和太阳赤纬角δ,观测时的太阳时角α用下式求出。
sinH=sinδ·sinψ+conδ·cosψ·cosα
太阳的方位角A可以根据太阳高度角H,时角。及赤纬角δ用下式.求出。
sinA=cosδ·sinα/cosH
太阳高度角和方位角确定后,太阳的位置也就确定了。光伏发电设备所在位置的经纬度坐标可以通过GPS全球定位系统获得,其他太阳能追踪系统运行所需要的数据都可以计算或查阅相关资料获得。
2 太阳能追踪系统的设计
2.1太阳能追踪系统基本结构
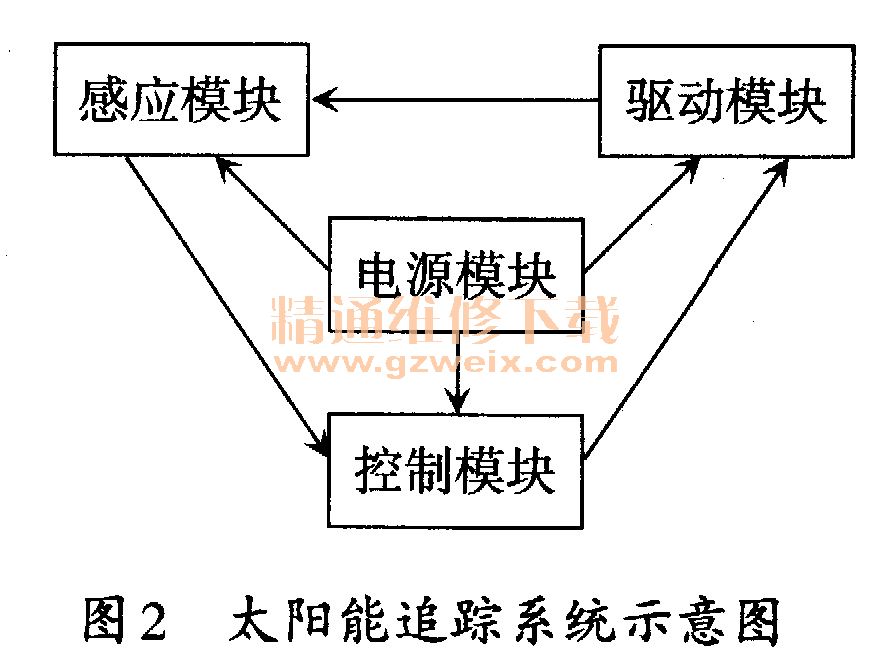
太阳能追踪系统主要包括三大主要模块:追踪太阳高度角和方位角的感应模块;调整光伏发电装置角度和位置的驱动模块;根据感应模块获取信息,进行综合分析和计算,控制驱动模块进行调整的控制模块。另外,为实现上述模块的功能,还需有电源等其他附属模块,具体见图2。
2.2追踪工作模式的选择
根据追踪工作模式的不同,太阳能追踪系统主要分主动式追踪系统和被动式追踪系统。主动式追踪系统使用光敏传感器感应太阳的位置,位置发生偏差,感应器会产生微电流或微电压变化,经放大电路放大,系统自动调整光伏发电设备的角度和位置,完成对太阳轨迹的跟踪。被动式追踪系统根据当前的时间,计算出太阳的高度角和方位角,按照设定好的程序,调整光伏发电设备的角度和位置,完成对太阳轨迹的跟踪。主动式追踪系统遇到大片云朵移动会发生误感应;被动式追踪不够智能,在光照不佳时也会工作。目前,最好的追踪模式是采用主动和被动相结合,以被动式追踪为基础,增加各种主动感应器,改进控制模块设计,实现完美追踪及自动修正。





