・上一文章:解析奥迪CVT变速器异响故障
・下一文章:2号机辅变倒送电带负荷校验方案及试验分析
3 放电控制
图6为二自由度结构器控制图,图7为单自由度结构器控制图。所谓二自由度控制一般是找到两组独立的参数,然后采用适当的设计方法,设计出两个独立的控制器,从而来获得最佳的干扰抑制特性和目标跟踪值特性来达到期望目标,它相比于单自由度控制具有更好的稳定性。

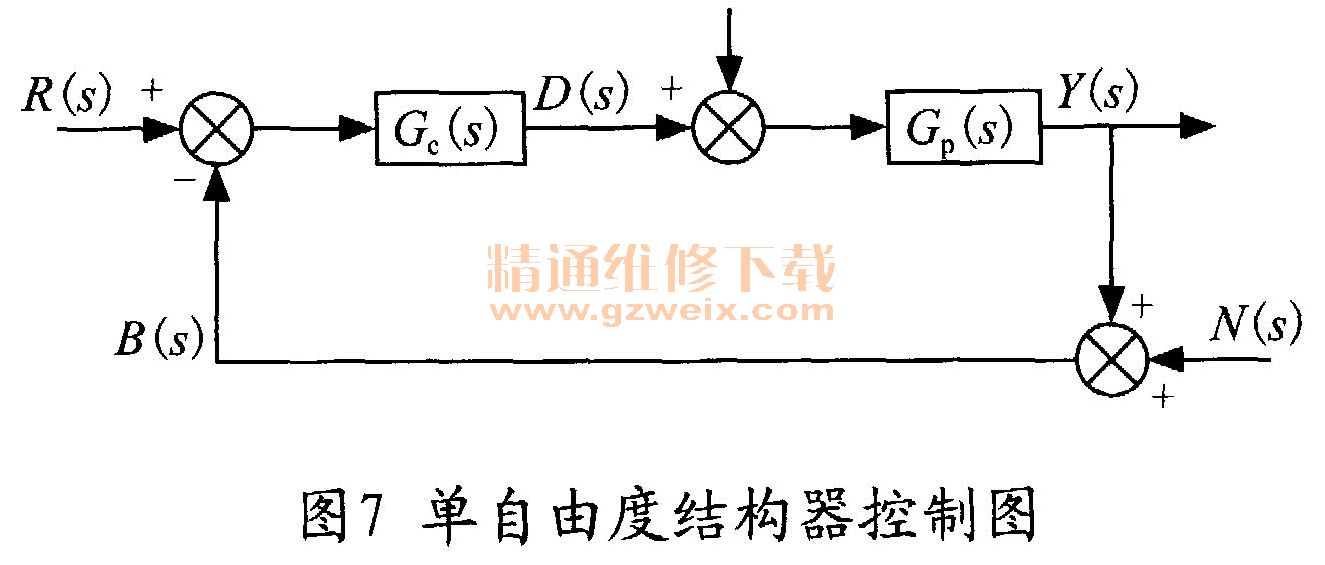
上两图中G、 (s)是一个控制对象的传递函数,假设其是固定的。因此对于这个系统,其闭环传递函数为:

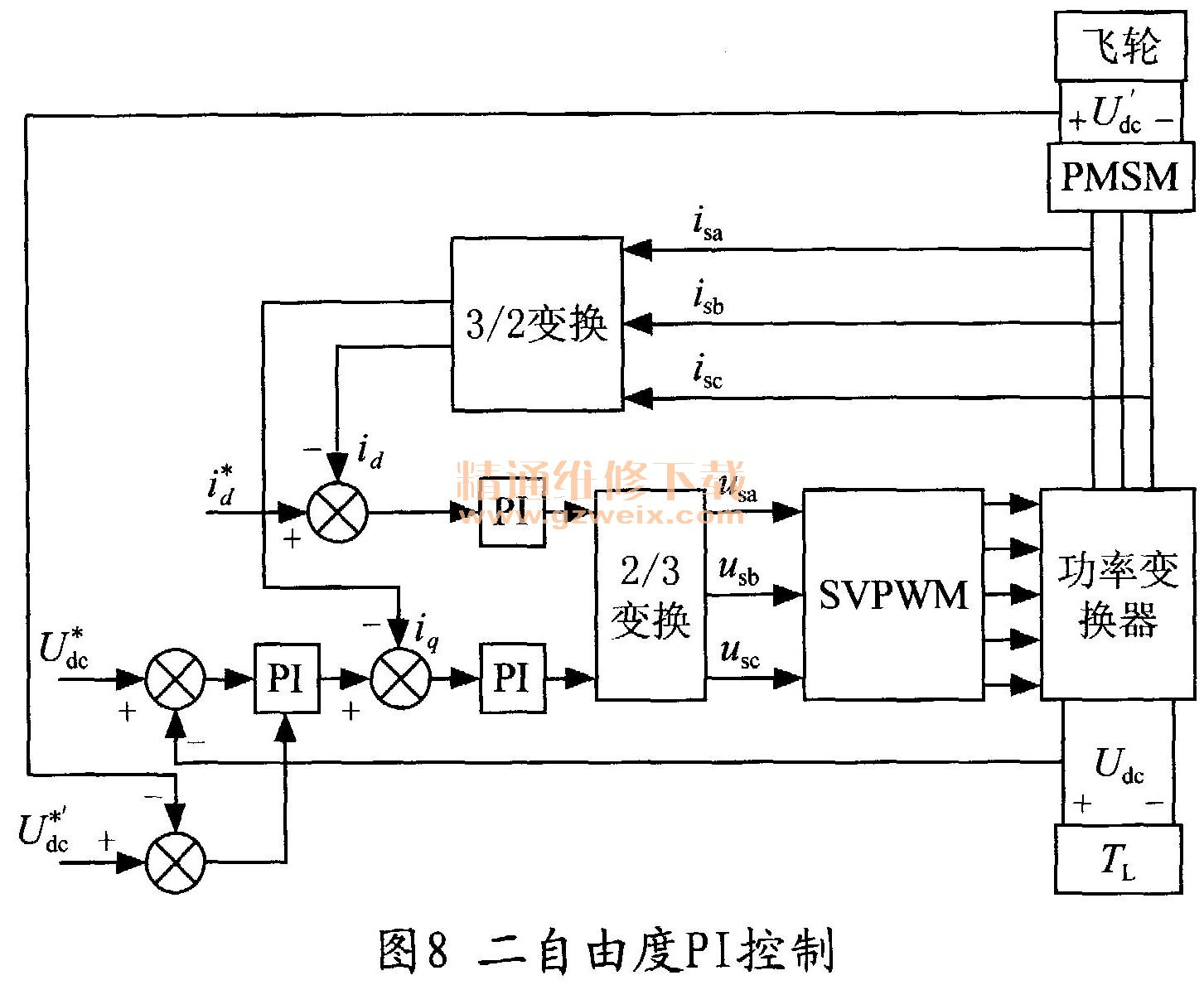
由式(4)、式(5)可以看出,如果给定了Gyd、那么GTyn也就是确定的。但是由于Gc1,和Gyd没有关系,所以Gyr就不是固定的,因此在这三个闭环函数中有两个是独立的,这就是二自由度控制器的设计原理。根据这个原理,本文设计了一种基于双向DC/DC的二自由度PI控制飞轮储能放电策略,如图8所示。过程如下:负载反馈电压和直流电机反馈电压与给定电压进行比较后,由P工控制器输出其误差信号,从而可以得出q轴电流的给定值i*;i*q经过解祸、坐标变换等处理后,得到SVPWM调制的脉冲信号,对双向DC/DC进行PWM升压斩波控制。
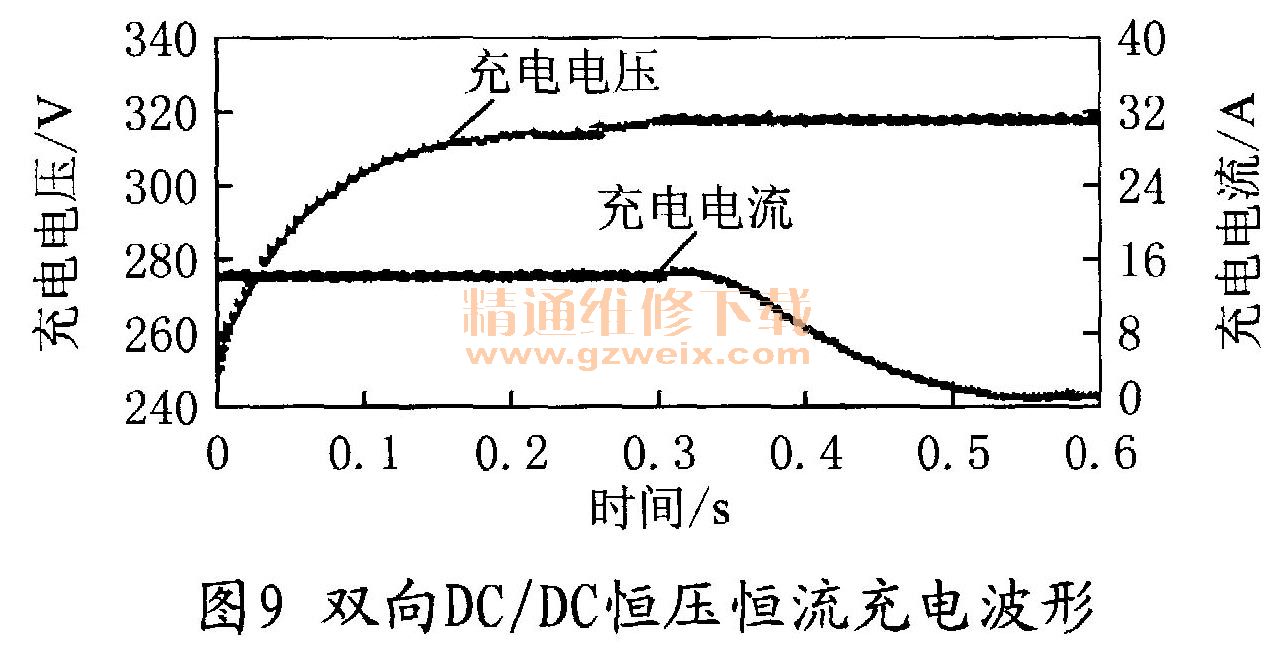
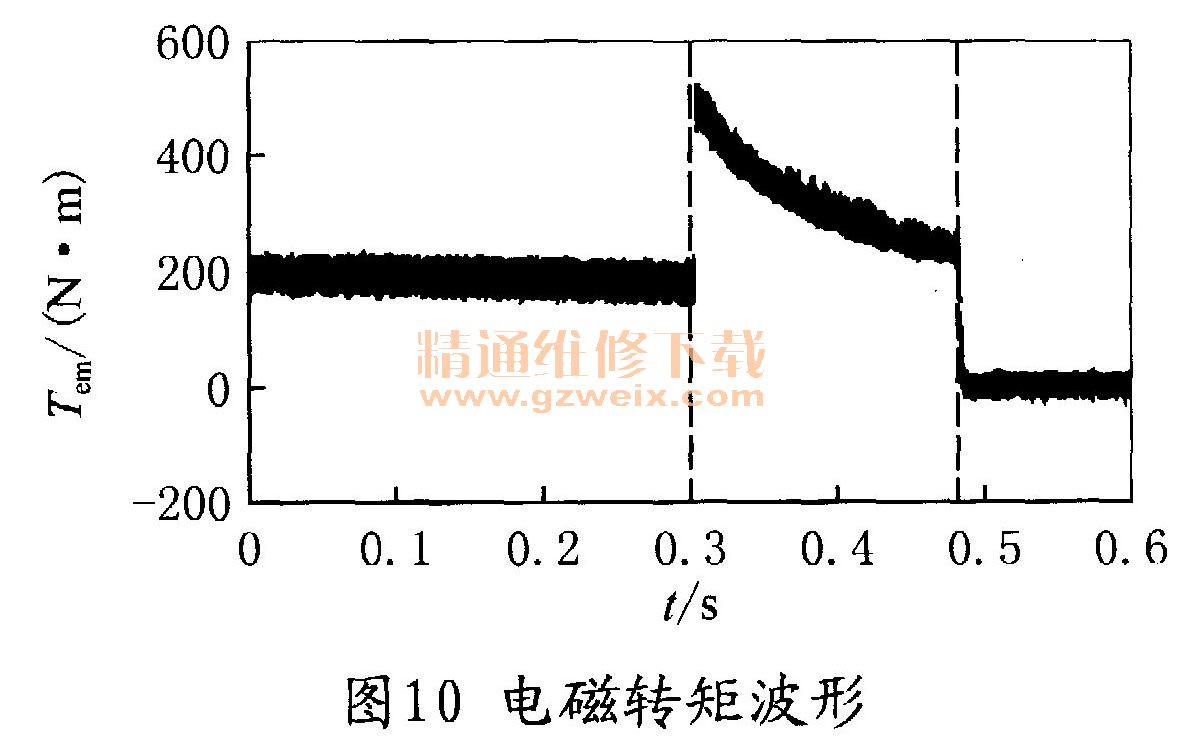
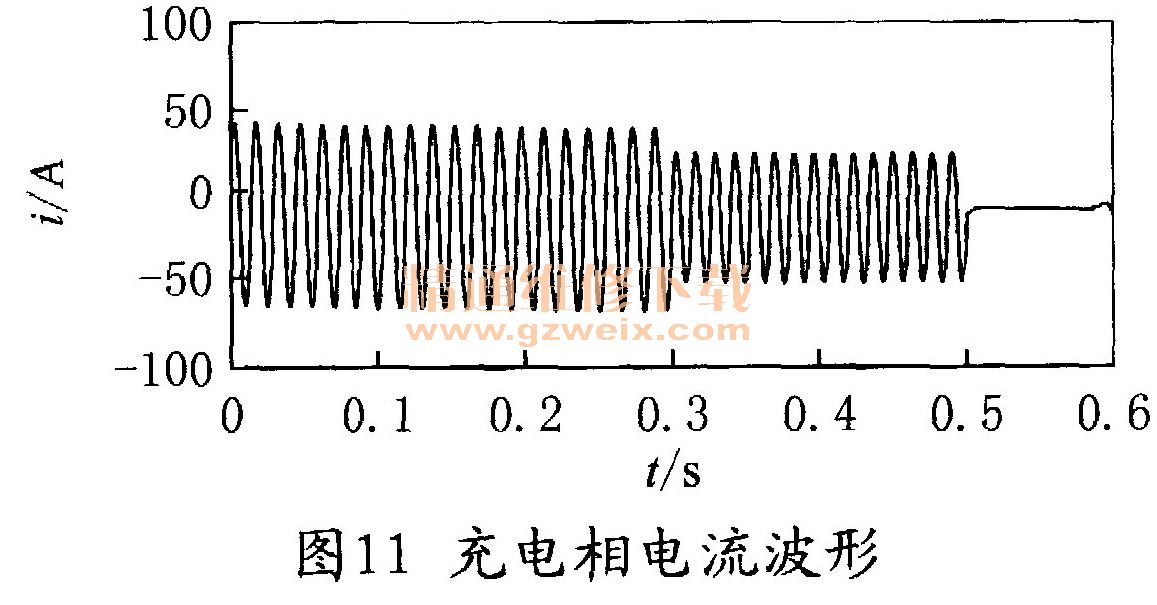
4 仿真结果及分析
根据飞轮储能系统的结构组成,搭建了充电仿真框图,系统参数设计如下:额定电压360V,电机极对数2,额定功率50 k W9额定转速1600 r / m i n、最大储能量1.4MJ,转动惯量101 k g·m2,直轴电感0. 234 mH,交轴电感0. 276 mH,直流电压400V。仿真结果如图9、图10、图11所示。