由图可以看出0.3s以前飞轮储能系统处于恒流充电控制充电状态,其线电流保持不变且id=0,Iq为一定值。0.3~0.5s系统处于恒压充电状态,其线电流减小,id<0,转速进一步升高。0.5s以后系统处于转速闭环控制状态,进入转速保持阶段。仿真表明该控制策略与所述理论分析基本符合。
仿真模型部分参数设计如下。
驱动电机参数:定子电阻2. 3 S2;转子两对极;等效电感L=0. 007 8 H;转动惯量 J=0. 005 6 kg·m2。
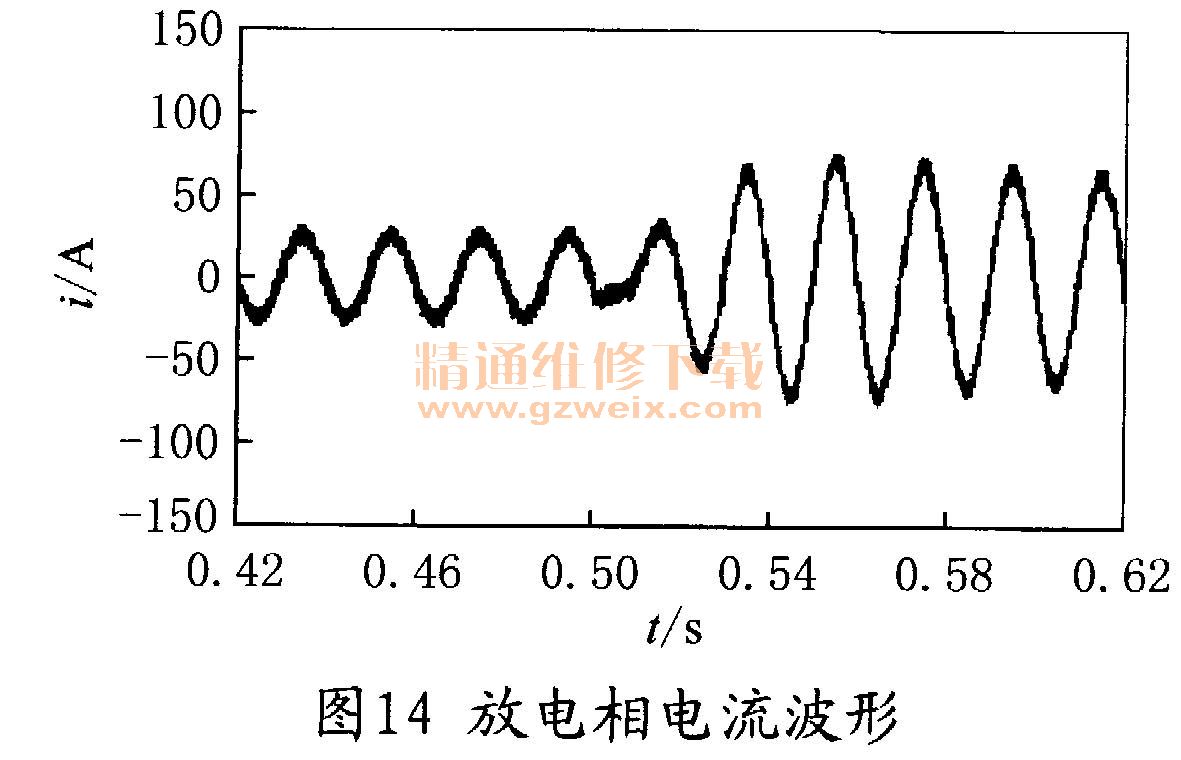
电力变换器参数:电感L=1 mH;滤波电容C1=1200μF、C2=1600 μF;负载电阻R=10 kΩ ; IGBT开关频率20 kHz。仿真结果如图12、图13、图14所示。
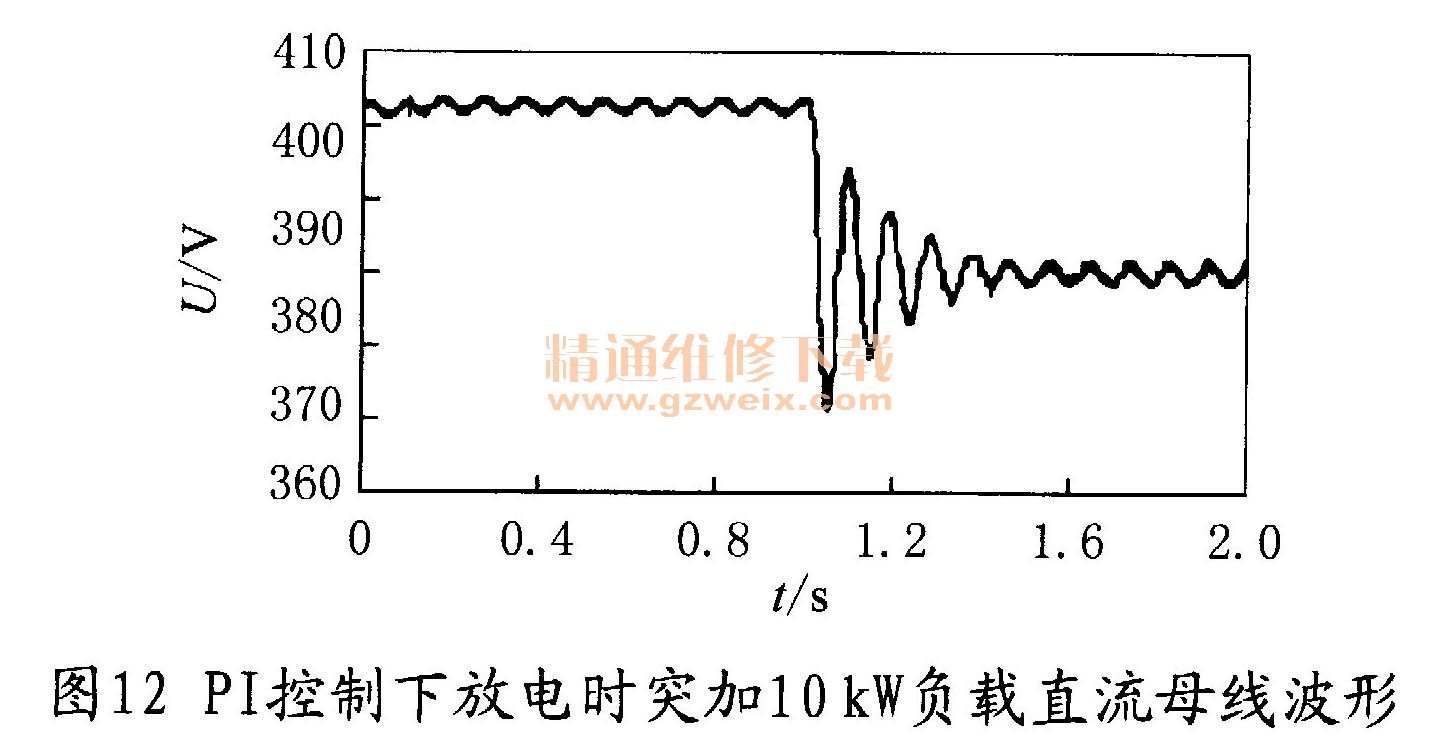
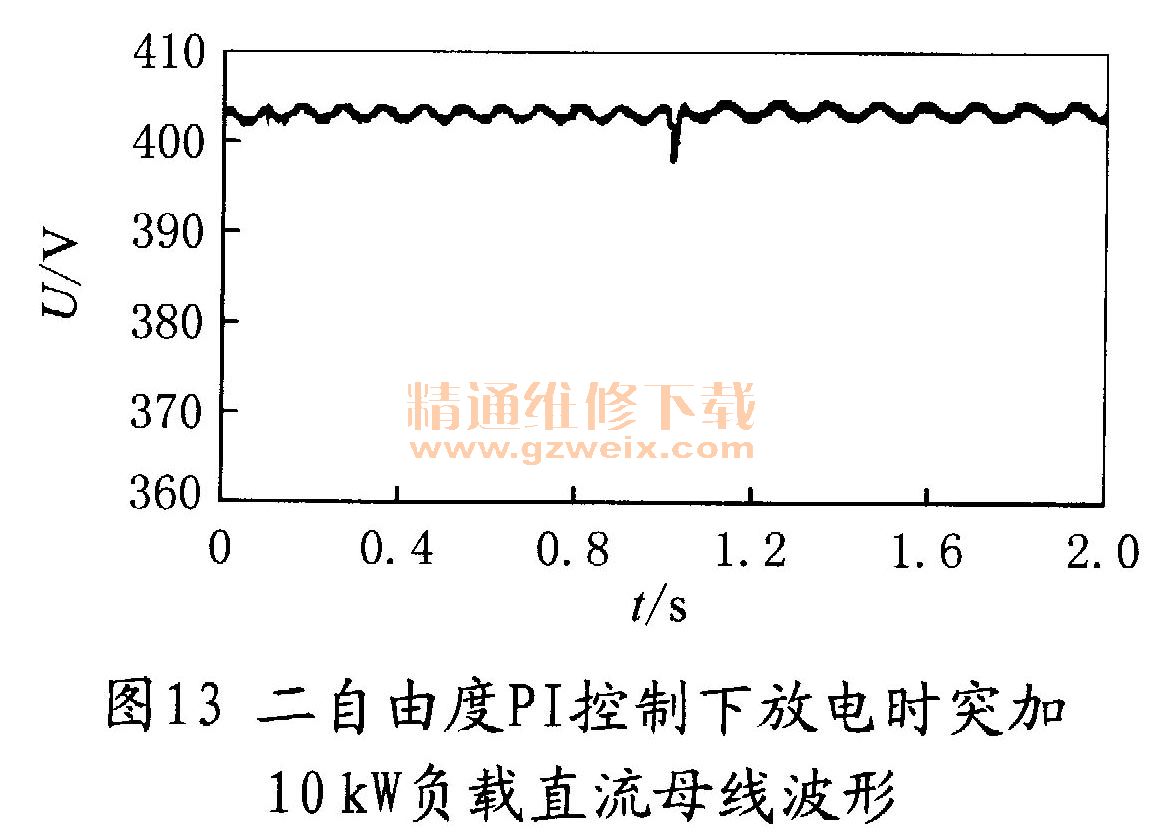
分别采用传统PI控制和二自由度PI控制在同样工况下对飞轮储能系统进行控制。由图可以看出,初始时,母线电压都保持在400V左右,在t=1 s时,突加10 kW负载,受扰动之后的电压都有一个回复的趋势,从波形可以看出传统的PI控制虽然最后也差不多能维持电压平衡,但变化太过突兀,且电压有点跌落。而相比于传统的PI控制,本文所设计的二自由度PI控制从波形上看具有更好的目标值跟随和抗负载干扰的能力。
5 实验验证
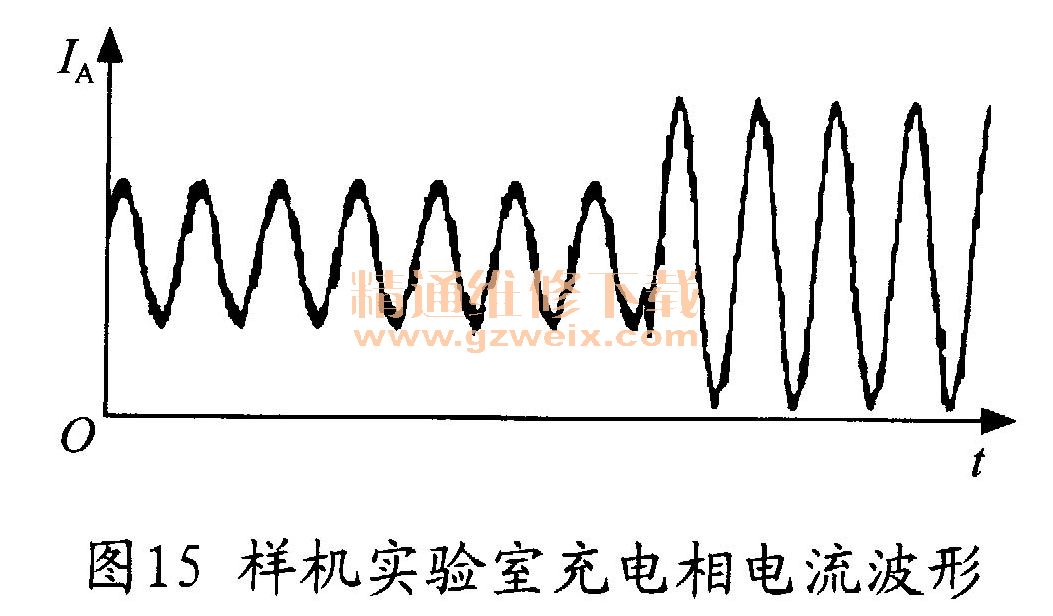
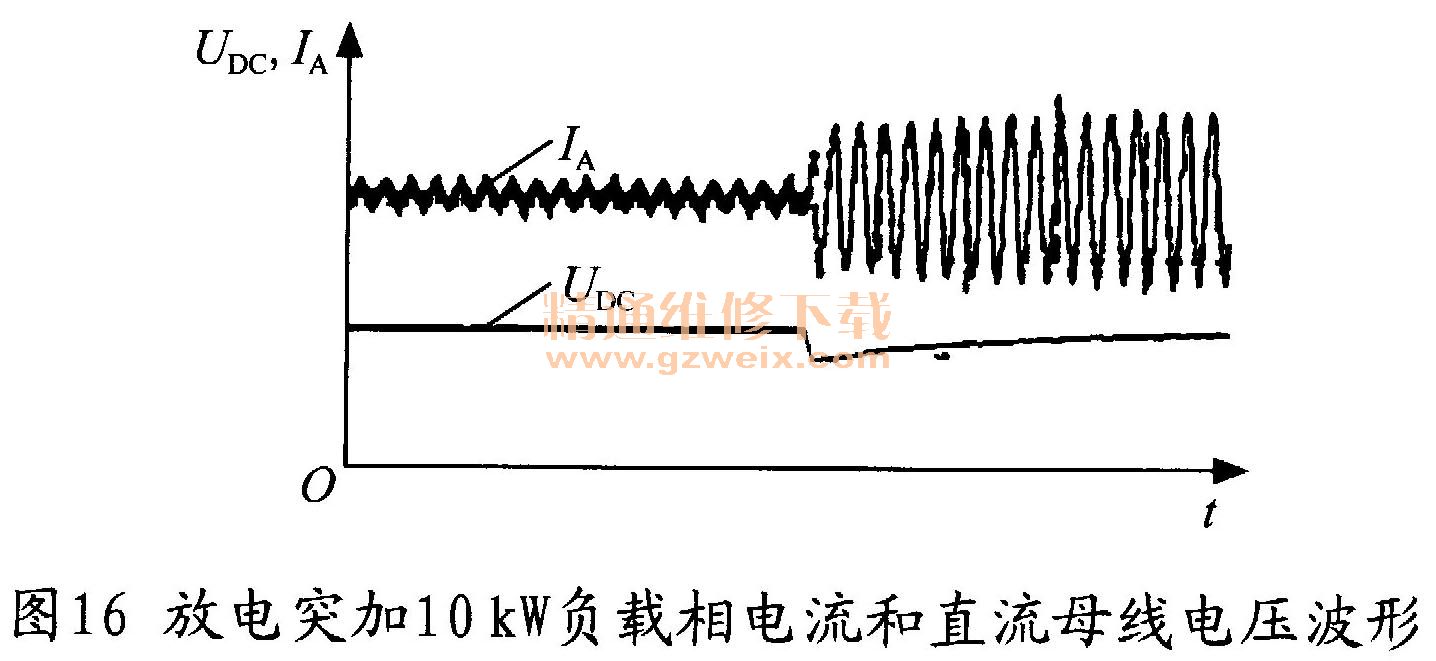
为了验证所提出的基于双向DC/DC的飞轮储能系统控制策略在实际系统中的可行性,搭建了10 kW双向DC/DC的常规样机,并接入了微网实验室的飞轮储能系统进行了充放电实验,图15和图16为实验波形图。
由图15和图16实验波形可以看出其与仿真结果基本一致,证明本文所提出的基于双向DC/DC的飞轮储能系统控制策略是可行的。
文中提出了一种基于双向DC/DC飞轮储能系统控制策略,充电时恒流、恒压、转速闭环的复合控制策略;放电时采用二自由度PI控制策略,解决了传统控制策略所面临的局限性,并且通过仿真和实验分析证明所提出的控制策略是可行的,能很好地对飞轮储能系统进行充放电控制。
上一页 [1] [2] [3]





