・上一文章:雷克萨斯RX200t轿车电源开关OFF后音响不关闭
・下一文章:核电厂1E级直流及UPS系统电气隔离方案研究
摘要:本文针对低压控制系统晃电故障,制定相应的处理措施,以提高设备运行可靠性。
交流接触器在低压电机控制系统中应用广泛,但是电磁式交流接触器的工作原理决定了其工作线圈在电网出现“晃电”时会短时断电或电压过低,从而导致靠电流维持吸合的动、静铁芯吸力小于释放弹簧的弹力,使接触器释放产生跳闸停机。为了加强低压电机控制系统的控制稳定性,必须采取防“晃电”措施。
1 常用防“晃电”措施(或设备)存在的问题
目前,常用的防“晃电”措施(或设备)主要有常规继电器组合单元、PLC可编程序控制器单元、群起群控装置、分散自起动模块单元、UPS不间断电源、DySC专利逆变(Inverter)技术、动力抗晃电装置(DC-BACK)、永磁式延时接触器。
(1)常规继电器组合单元所需的元器件太多,线路复杂、柜内占用空间太大。
(2)采用UPS不间断电源改造只由普通接触器控制的回路,虽然所需的改造时间较短,线路改动不大,但是投入较大、成本高,仅限于生产装置主要关键电机,而不可能对全部电机配备。
(3)PLC可编程序控制器单元、群起群控装置、分散自起动模块单元、DySC专利逆变(Inverter)技术、动力抗晃电装置(DC-BACK)、永磁式延时接触器等防“晃电”设备的价格都太高,特别是用于只由普通接触器控制的回路的改造,成本就更高,所需的改造时间也太长。
根据以上分析,必须采取新的防“晃电”措施。
2 低压控制系统晃电故障处理方案
本文将介绍一种新的防“晃电”方法,该方法所需元器件少、柜内占用空间不大、线路简单、成本低,特别适用于只由普通接触器控制的回路改造,所需的改造时间不长,且能可靠实现低压控制系统防晃电功能。
2.1技术方案原理
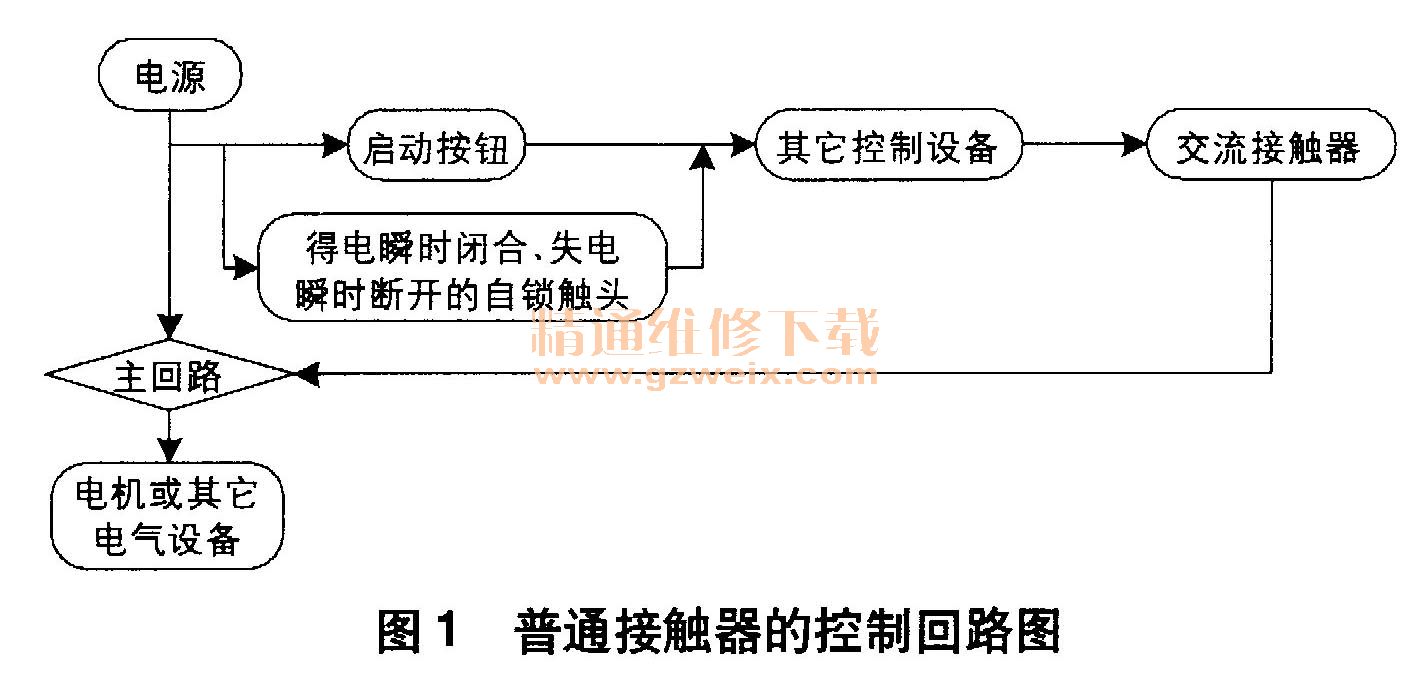
普通接触器的控制回路(如图1所示)中,自锁触头是得电瞬时闭合、失电瞬时断开的动合触头。“晃电”时,电磁式交流接触器工作线圈会短时断电或电压过低,从而导致靠电流维持吸合的动、静铁芯吸力小于释放弹簧的弹力,使接触器释放产生跳闸停机。
新增一个得电瞬时闭合、失电延时断开的延时触头(如图2所示),替换原回路中并联在启动按钮两端的得电瞬时闭合、失电瞬时断开的自锁触头。“晃电”时,延时触头在设定的延时时间内处于接通状态,在这段时间内,电压降到额定值50%以下时,接触器脱扣、电机功率下降、电机转速开始降低,但是电机拖动的设备由于惯性原因其转速不会出现明显下降。当“晃电”消失后,由于延时触头处于接通状态,因此不需要按启动按钮,电机自行恢复运行状态,保证电机不会因“晃电”而中断运行。
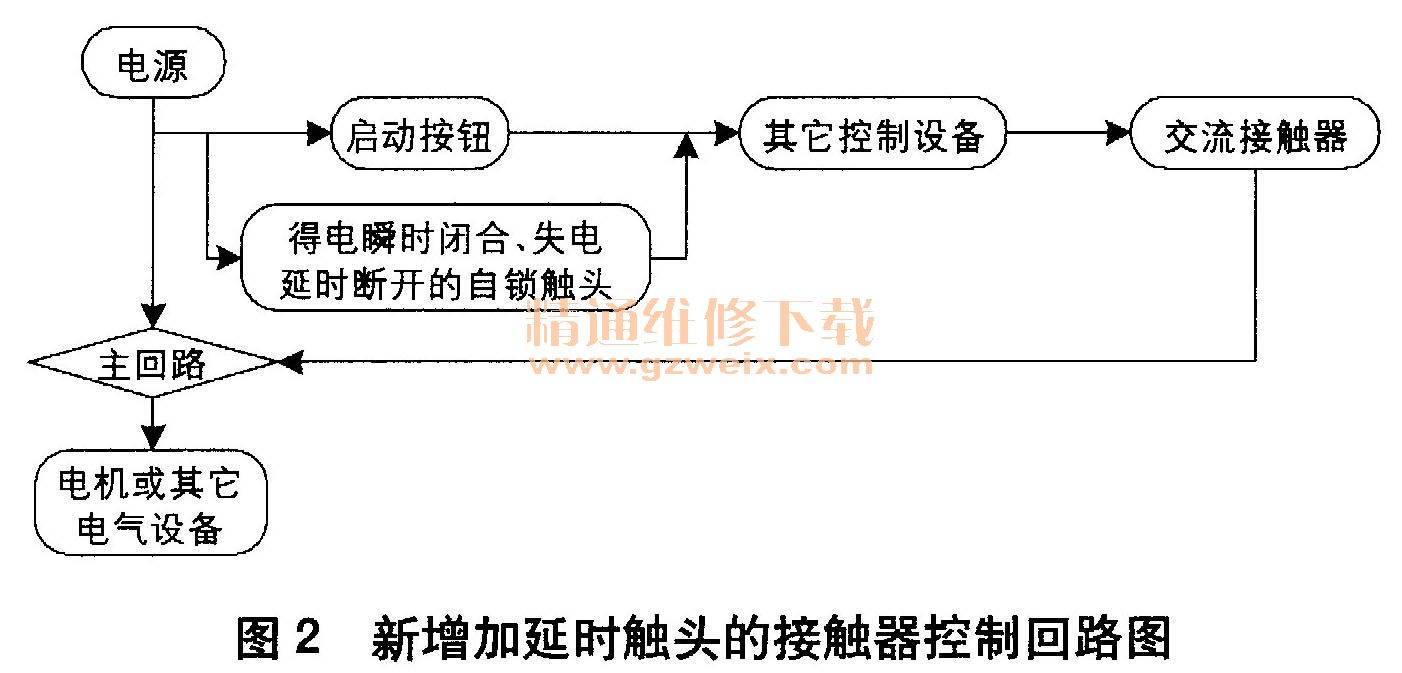
图2新增加延时触头的接触器控制回路图
另外,对于其它电气设备控制回路,如果“晃电”持续的时间小于延时触头设定的延时时间,那么电源系统恢复后也不需按启动按钮,电气设备将自行恢复通电状态。
2.2技术方案实施步骤
(1)卸下原回路中并联在启动按钮两端的自锁触头两端的连接导线。
(2)卸下原回路中并联在启动按钮两端的得电瞬时闭合、失电瞬时断开自锁触头。
(3)将新增的得电瞬时闭合、失电延时断开的延时触头安装在原接触器上。
(4)将新增的延时触头并联连接在启动按钮两端。
(5)用电秒表整定接触器新增的延时触头的失电延时断开时间。
①如图3所示,当合上刀开关DK时接触器线圈J得电,新增的延时触头J1瞬时闭合,此时电秒表的“K”端和“关”端通过刀开关DK下刀闸与接触器新增的得电瞬时闭合、失电延时断开的延时触头J1短接激磁线圈,电秒表不会动作。
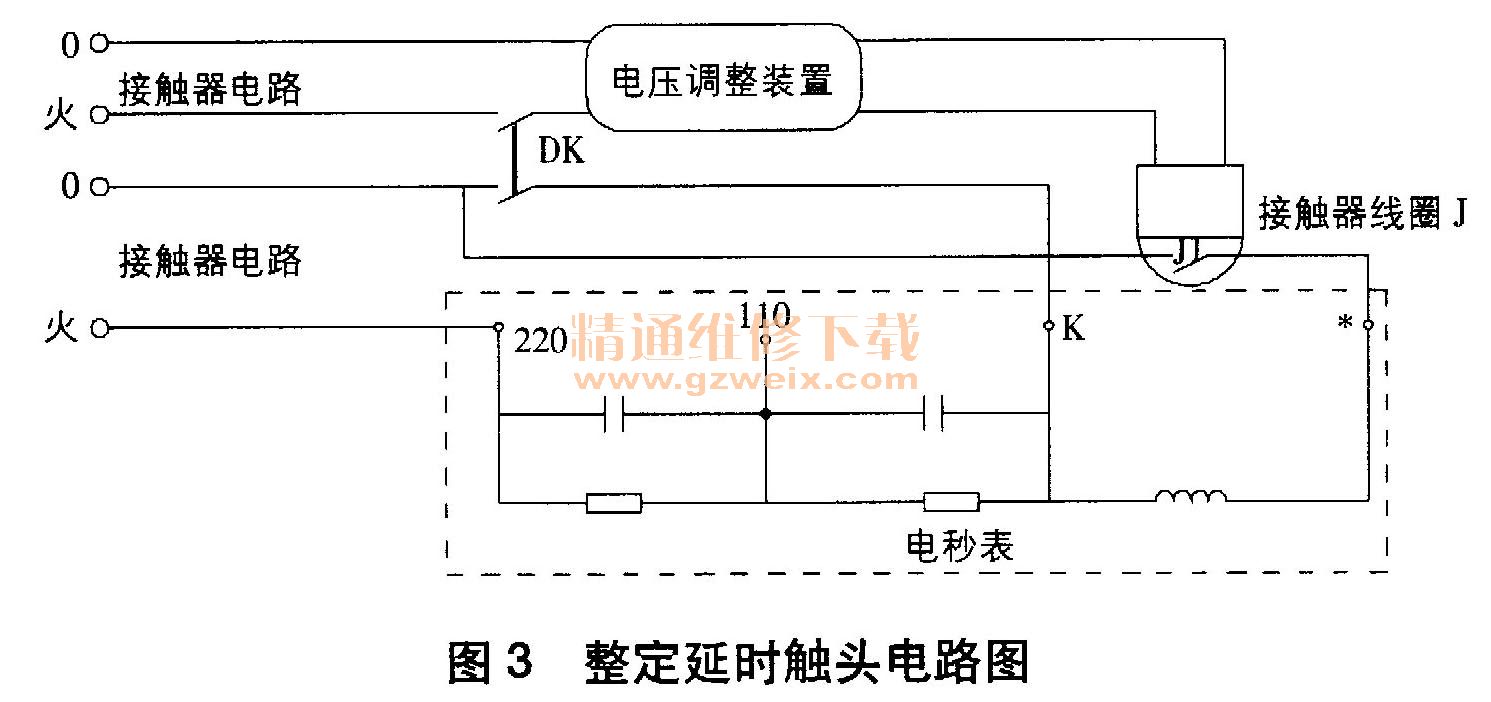
②切断刀开关DK刀闸,此时电秒表的“K”端和“*”端因刀开关DK的切断而断开,而新增的延时触头J1需延时才能断开,故电秒表的“220V”端和“*”端构成回路,电秒表开始计时,当延时触头J1的延时过程结束时,延时触头J1断开,电秒表停止计时。
③电秒表的计时时间就是原接触器线圈失电后新增的延时触头延时断开的时间。
(6)“晃电”持续时间一般小于1. 5s,在这段时间内,电压降到额定值50%以下时,接触器脱扣、电机功率下降、电机转速开始降低,但是电机拖动的设备由于惯性原因其转速下降得并不明显。为此,将电机控制回路接触器延时触头的失电延时断开时间整定为1. Ss。
(7)对于其它电气设备控制回路,也可根据具体的生产需要,将接触器延时触头的失电延时断开时间整定在大于经常“晃电”持续的时间,如此可有效避免电网“晃电”导致的跳闸停机故障。
3 结束语
实施改进措施后,有效避免了因雷击、短路或相邻故障造成电网短时电压波动或短时断电而出现的接触器释放引发的跳闸停机事故,降低了设备费用,提高了电气设备可靠性,保证了安全生产。该措施适合在“晃电”几率大的低压控制系统新建项目中推广使用,尤其适用于已使用的低压控制系统,在无防晃电装置的配电柜内采取该措施可提高运行设备的可靠性。





