・上一文章:声电联合检测法在GIS局部放电检测的应用
・下一文章:高压输电线路绝缘子的选型和应用
2 伺服系统的三环整定
在伺服控制系统中,电流环和速度环直接在伺服驱动器内部整定,位置环则由PLC控制,通过发出的指令及伺服电机的位置反馈指令,并结合伺服驱动器内部的位置环功能进行整定。
2.1电流环的整定
电流环是三环中的最内环,是伺服电机性能的直接体现,保证在无静差情况下实现稳态及理想的堵转特性。永磁同步交流伺服电机的电流环以电机的传递函数为中心,前置放大环节的PWM逆变传递函数,后置转矩系数和等效惯量,再加上电流滤波器等环节,形成典型的电流环结构(如图4所示)。
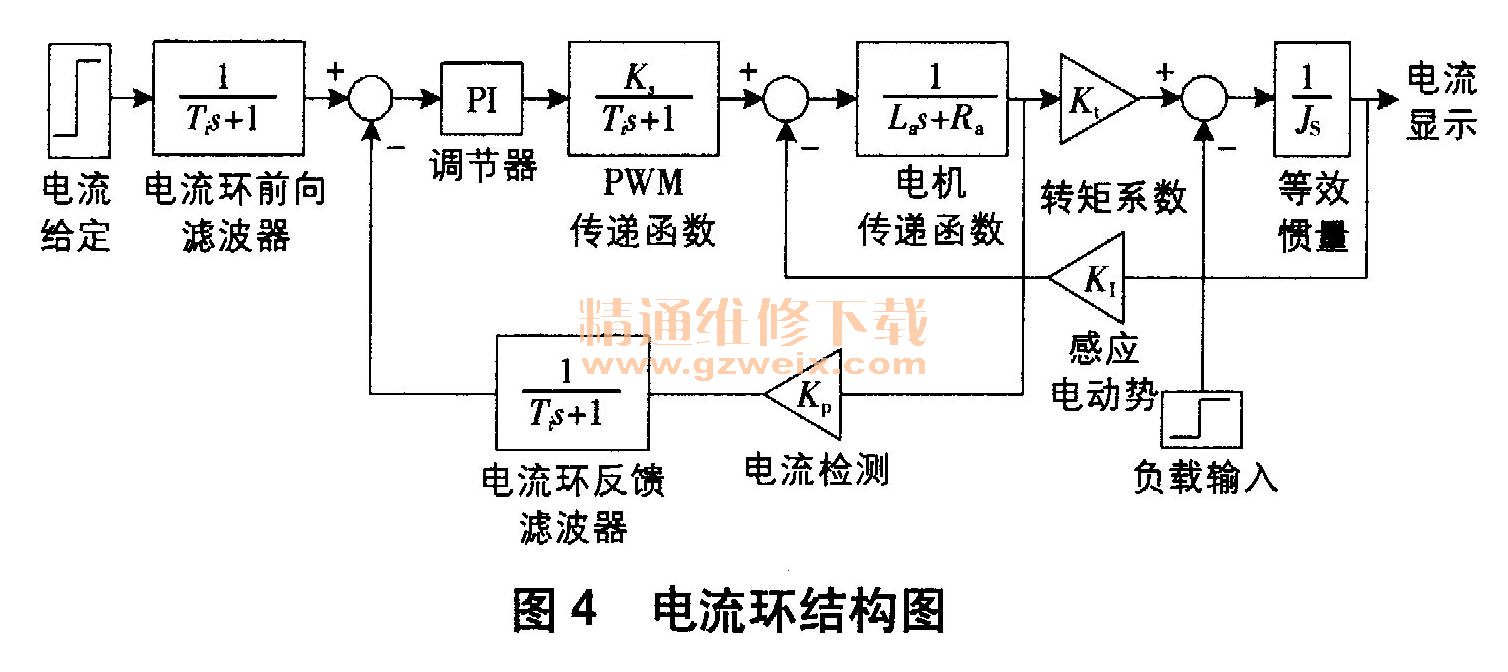
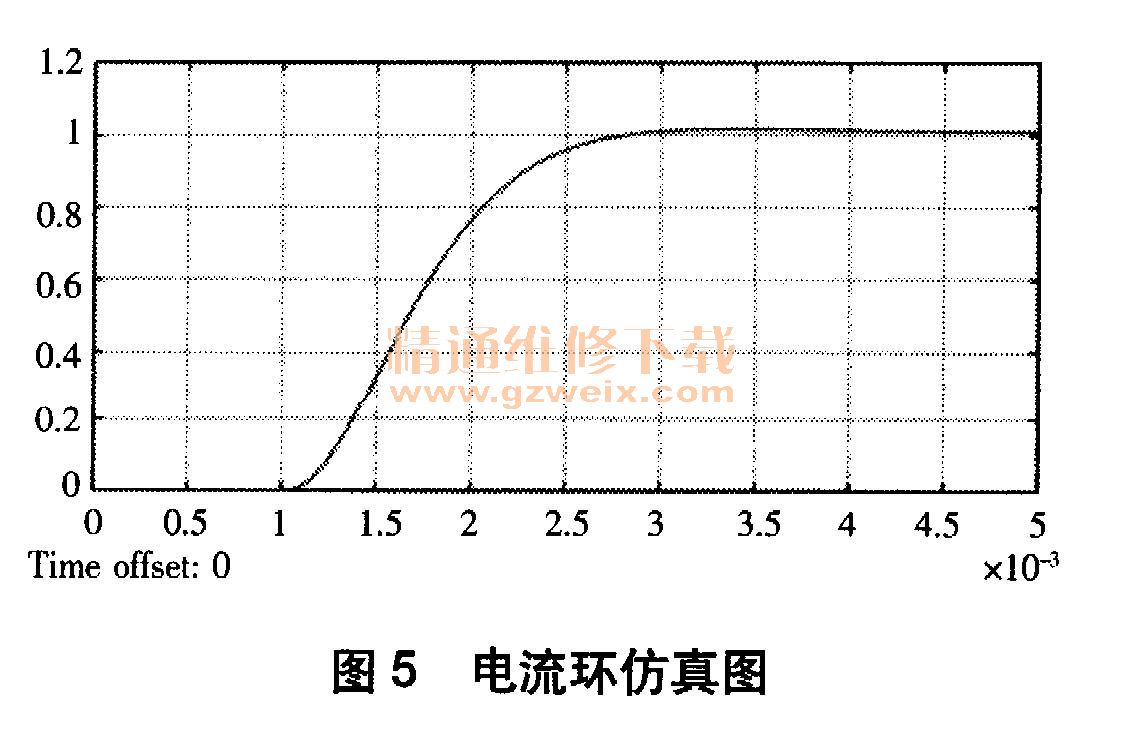
比例时间常数T5和比例增益K、决定着电流环的响应速度和超调量,整定时以超调量在合理范围内为基础,尽可能增加响应速度,为速度和位置环的调试提供足够的时间裕量。电流环的调试是在不带载情况下由驱动器内部根据输入的电机参数自动进行计算的,在多次计算的数值中选取比例时间常数最大值TS = 5. 30,比例增益K1=8.94,随同电机参数带入图4中进行仿真,得到仿真图(如图5所示)。由此可知,此时波形稳定、超调量很小,可在此基础上进行速度环和位置环的整定。
2.2速度环的整定
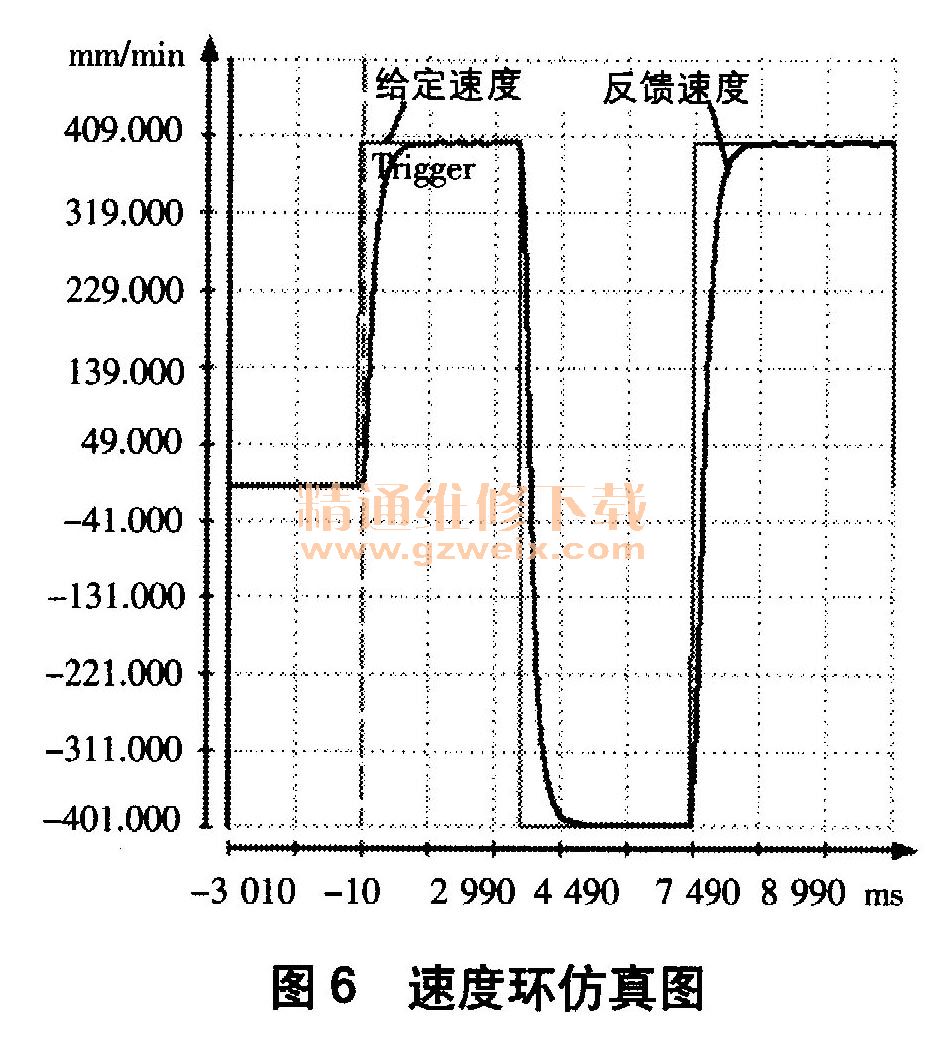
由于运动小车承载着液压泵、清尘系统等重量大的设备,且车轮和滑轨间有较大的摩擦,因此无法通过自动计算来设定相应参数,需配合行走工作来整定。速度环的主要参数为速度比例增益Kv和速度积分时间常数TV,且都比电流环的增益和时间常数小,以便实现由内到外的快速反应,否则会出现系统的震荡及速度的不稳定;同时也不能为了稳定而设得太小,否则会影响速度环的反应时间及速度爬行时间。Indra Works Ds 9. 14内置示波器以检测速度和位置等给定和反馈信号,点开“Oscilloscope”页面导人两个参数,通过对参数值的不断调整,得到速度比例增益Kv=4. 90,速度积分时间常数Tv = 3. l0rns时的波形(如图6所示)。由此可知,速度爬行曲线平滑,速度跟随性能良好,为了给位置环的整定留有增益余量,允许有微小的波动且经位置环整定后可消失。
2.3位置环的整定
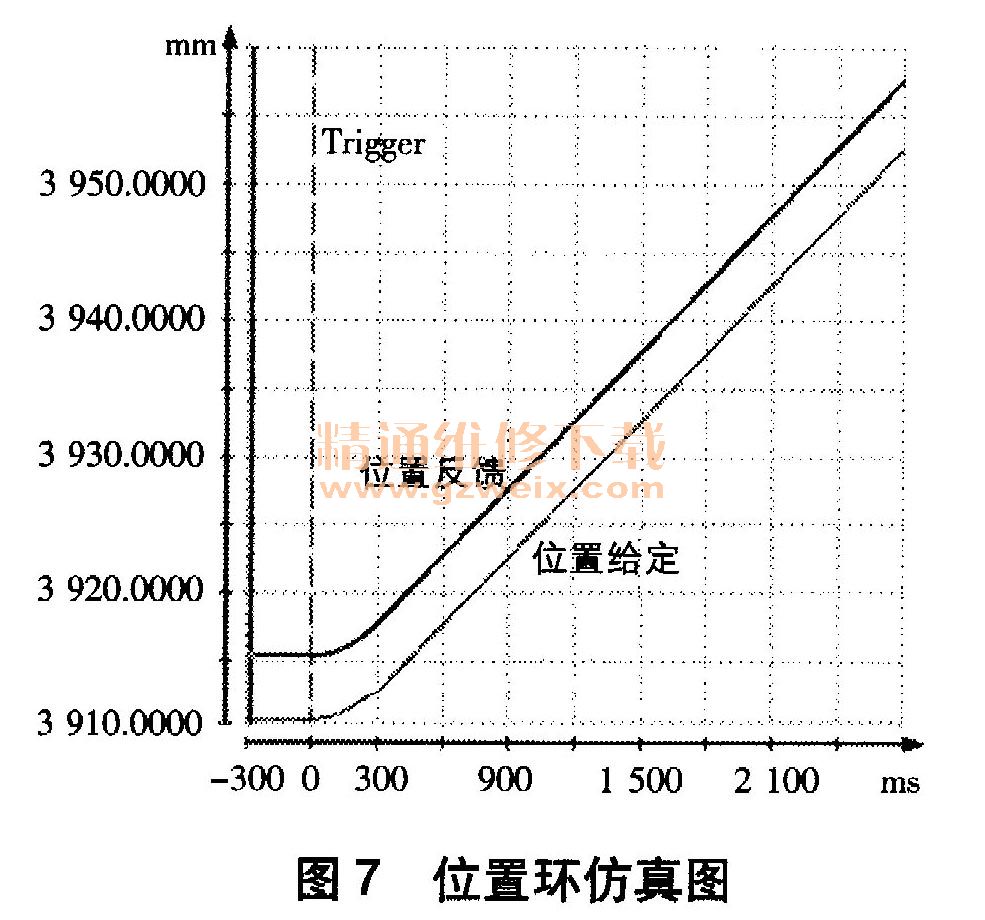
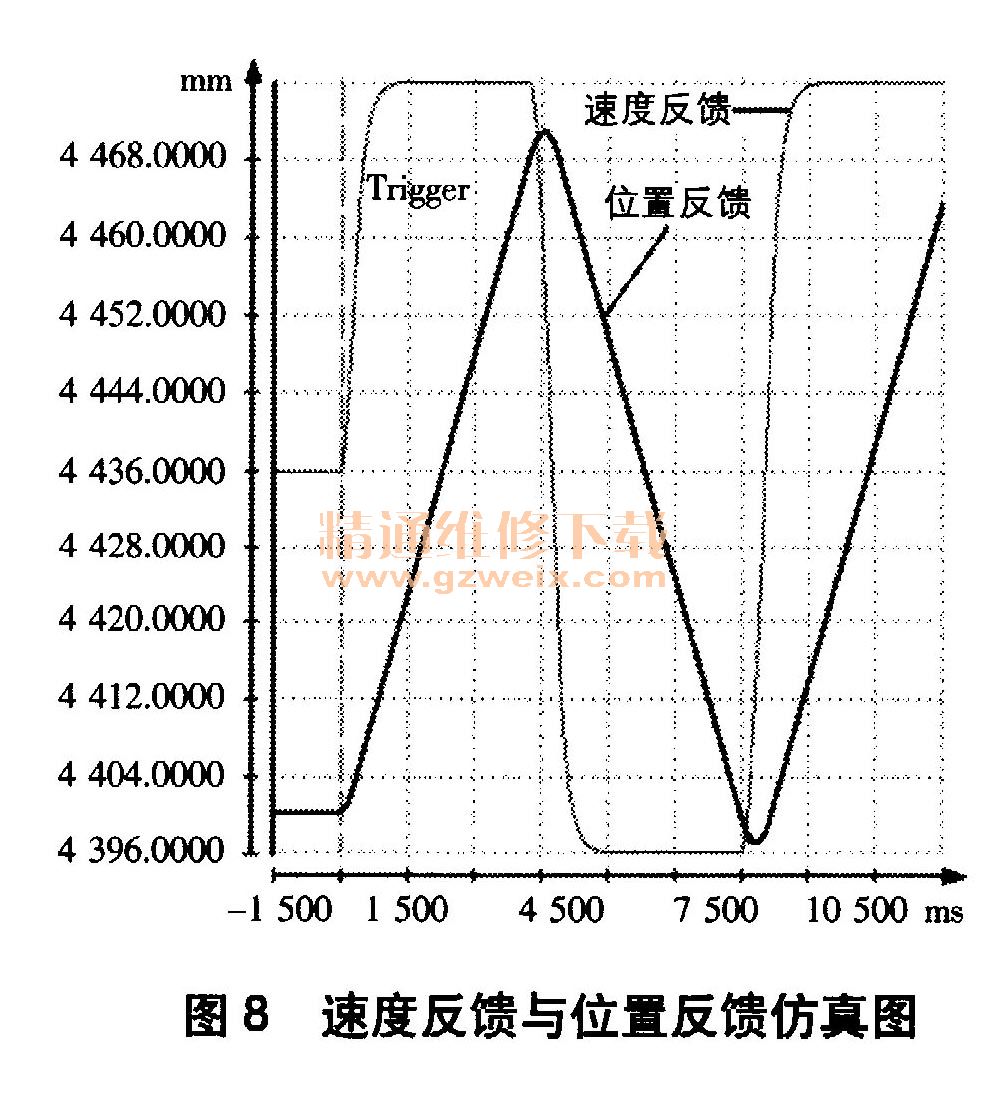
位置环的整定是最后也是最关键的一步,主要由PLC的给定指令和编码器的反馈指令来形成一个闭环控制,影响性能的主要参数为位置比例增益Kp,且要小于速度环的增益才可实现位置的跟随性能,太大会引起伺服电机的震荡和锁定力度。经多次试验,得到Kp = 4. 50时的位置给定和反馈仿真图(如图7所示)。由此可知,将位置反馈的轨迹提高一个格距后就与位置给定处于平行状态,表明位置的动态跟随性能很高,将位置反馈与速度反馈整合在一个页面,通过操作运动小车的前进、后退来监测速度的稳定性,得到的速度反馈与位置反馈仿真如图8所示。由此可得,速度反馈和位置反馈都处于平滑稳定的状态,没有波动,此时可按照工艺要求实现精准的位置控制。
3 结束语
本文介绍了伺服驱动器在位置控制中的配置和整定,通过合理的参数设定可使系统具有良好的响应速度和动态跟随性能,在实际工作中位置定位精度高、加减速平滑,为一键自动化提供了必要的保障。





