・上一文章:声电联合检测法在GIS局部放电检测的应用
・下一文章:高压输电线路绝缘子的选型和应用
摘要:本文对内清扫设备运动小车的伺服驱动系统进行参数配置,利用仿真在空载状态下对电流环进行整定,在带载情况下对速度环和位置环依次进行优化并通过示波器监测其性能,从而实现伺服系统最终的位置控制,为设备的自动化运行提供了必要的保障。
位置控制是伺服驱动器的一种运动控制方法,它充分利用了电流环、速度环和位置环的功能,使得设备可根据工艺要求在不同位置点进行相应的工作,还可把实时数据通过可视化界面反馈给操作者。预精焊螺旋焊管制造车间的内清扫设备主要由运动系统、液压系统和吸尘系统组成,其中运动系统包括旋转辊和运动小车,直接体现了设备的工艺。旋转辊负责在工作时使焊管匀速旋转;运动小车由交流伺服电机驱动在固定铁轨上往返行走,前端有可穿过焊管内部的探臂,探臂顶端固定着液压驱动的磨头和吸尘管。运动小车在不同位置都会有相应的探臂支架、磨头的升起或降落,以及行走速度的改变,这种情况下伺服驱动器对伺服电机的位置控制便起到了关键作用。本文主要对选用的力士乐伺服驱动器进行参数配置,并对其内部的三环控制进行优化整定,以实现设备的位置控制功能。
1 伺服系统的配置
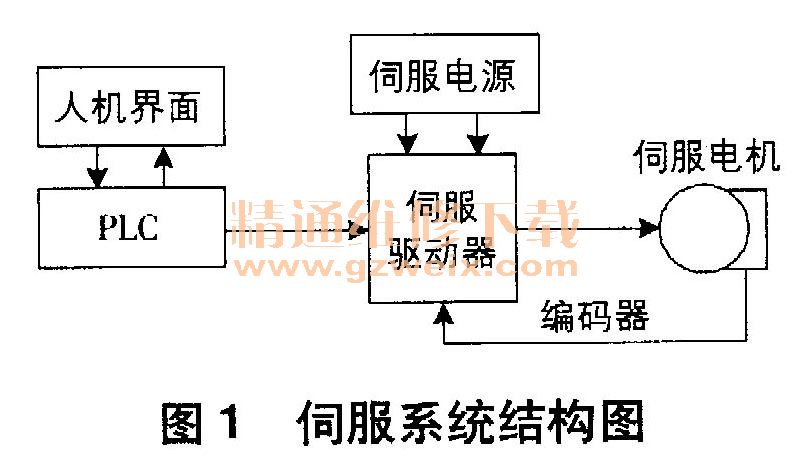
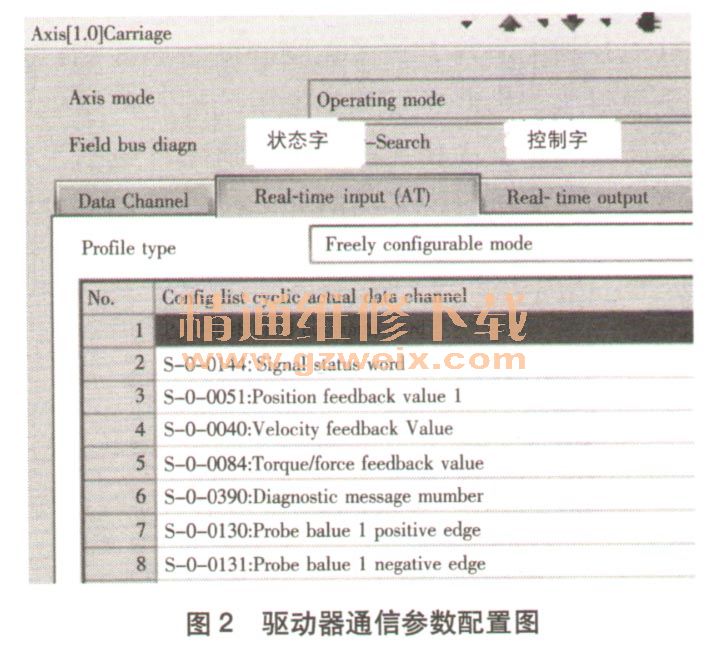
运动小车伺服系统硬件配置以伺服驱动器为核心,上端有给出操作指令及发送/接收实时脉冲数据的PLC,PLC连接的人机界面可进行速度、位置等参数的设定并实时显示;下端控制交流伺服电机通过编码器发出反馈脉冲,在驱动器内部进行运算比较,从而实现对伺服电机的精准位置控制。伺服系统结构如图1所示。参数配置,其中最重要的是与西门子PLC的通信配置及伺服电机的性能参数配置。西门子PLC实时监测驱动器的速度、位置、力矩等状态并发出正反转、加减速等命令,这种控制主要通过访问地址实现,每个地址都在驱动器中有相应的功能参数。驱动器通信参数配置如图2所示。
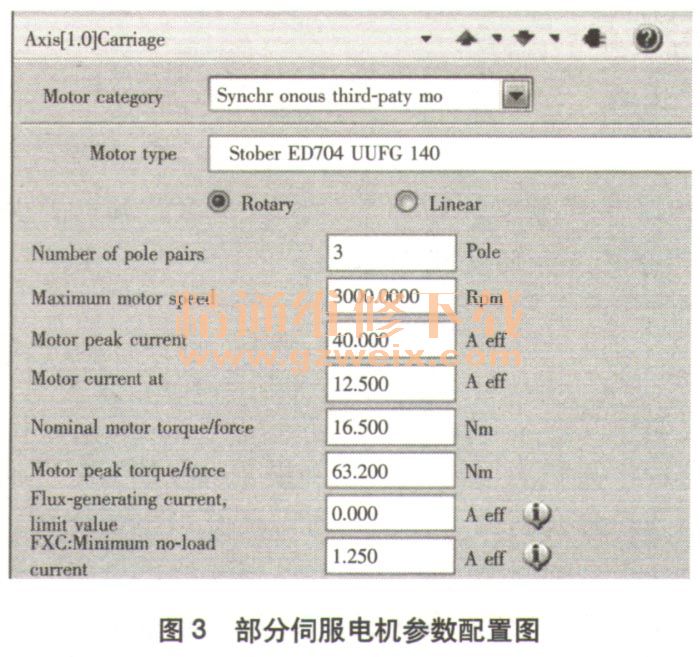
伺服系统的参数配置是关键,本设备选用的力士乐伺服驱动器主要通过专用软件Indra Works Ds 9. 14来进行力士乐伺服驱动器采用三环控制,内部有强大的三环运算功能。而伺服电机参数是进行运算的基础,可在软件设定栏“MOTER”的界面下进行设定。部分伺服电机参数的配置如图3所示。
除以上重要参数配置外,还有电机抱闸、温度、电机传动轴等参数的配置,以完成伺服电机的保护和量化等功能,使伺服电机、伺服驱动器、PLC有机结合在一起,为实现位置控制提供稳定的平台。





