・上一文章:收发分频双线极化微带天线的应用分析
・下一文章:DC/DC电源中的纹波抑制设计
摘要:为实现机器鱼比赛中鱼体的自主信号采集与处理、自动探测前方目标及实现水下自主避障等控制功能,文中设计了基于数字信号处理器TMS320DM355、水下摄像机KM-273CW以及SAA7111A增强型视频输入处理器等构成的可实现鱼体自主避障功能的水下机器鱼控制系统。该系统还具有信息传输功能,可以将水下的环境数据传输到岸上,以利于观察人员研究水下环境。
关键词:自主运动控制;水下视频采集;水下机器;TMS320DM355;SAA7111A
引言
在传统的机器鱼比赛中,鱼体的运动控制功能是依靠比赛场地上方的摄像头采集数据,然后将其发向主机,由主机完成数据的处理,并将结果发给鱼体内部的处理器,从而完成避障等运动控制功能。但这种方案存在诸多问题,首先,不能体现鱼体运动和控制的自主性;其次,采集数据时占用了主机的资源,同时主机发给鱼体的信号也较容易受外界信号的干扰;最后,对于水下机器鱼的现实实用性较差。综合以上,本文设计了一种改进方案,即在鱼体内部嵌入可应用于水下的摄像头KM-273CW,通过采集视频信号,并经过视频输入处理器SAA7111A的处理,将模拟视频信号转化为数字信号,并送入TMS320DM355中进行分析处理,之后根据处理的结果调用程序去实现鱼体的自主避障及其他运动功能,从而实现鱼体的自主运动控制。
1 TMS320DM355芯片介绍
TMS320DM355数字媒体处理器最大的特色就是有专用的视频图像子系统VPSS,用于处理视频数据,其视频处理子系统VPSS包括视频前端输入接口VPFE和视频末端输出接口VPBE,视频前端输入接口用于接收外部传感器或视频译码器等输入的图像信息,视频末端输出接口输出图像到显示屏显示。其中视频前端输入(VPFE)接口是由CCD控制器,硬件图像信号处理器-图像通道IP-IPE模块,自动曝光/白平衡/聚焦模块H3A和寄存器组成。CCD控制器可与视频解码器、CMOS传感器或电荷耦合装置连接;IPIPE是实时硬件图形处理器,用于实时图像处理,它把从CMOS/CCD得到的原始图形转换为国际电信联盟ITU数字视频标准BT.60I/BT.656的8/16位数字YCbCr4:2:2。视频解码器以54.MHz的速率进行D/A转换,提供NTSC/PAL等格式的视频或音频输出。同时该器件还具有8/16位YCC到18位RGB666数字输出;ITU数字视频标准BT.
601/BT.656的8/16位数字YCbCr4:2:2。通过缓存逻辑与TMS320DM355的DDR2/mDDR片上控制器相连,便于访问存储器,向存储器存储由摄像头采集并经VPFE处理的图像信息,并将存储的图像信息通过VPBE输出到显示设备,因此可以很好的实现视频信号的接收、处理与输出。
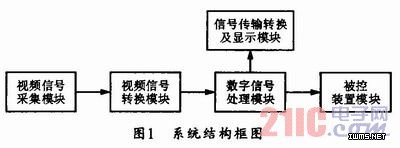
系统的结构框图如图1所示,由于本系统设计的是可自主运动的水器鱼,视频信号转换模块采用的是视频输入处理器,即用视频A/D转换芯片来完成视频信号到数字信号的转换,方便后面的数字信号处理器进行分析、处理和控制。数字信号处理模块的核心芯片是TMS320DM355。通过它可以将视频信号转换模块送入的数字信息进行分析和处理。被控运动装置模块即是机器鱼内部的各个电机与舵机。通过接受数字信号处理模块的各种控制信号完成机器鱼的水下自主运动。信号传输、转换及显示模块通过无线电传输系统将数字信号传输到岸上的接受装置,通过信号转换将水底的信息在主机上显示,使岸上的观察者也能了解机器鱼水下运动的情况。