・上一文章:收发分频双线极化微带天线的应用分析
・下一文章:DC/DC电源中的纹波抑制设计
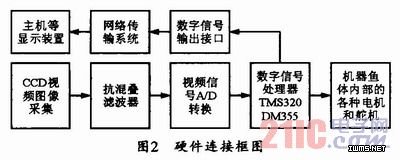
视频信号A/D转换部分采用的器件是Philips公司生产的SAA7111A增强型视频输入处理器。该芯片的优点在于集A/D转换与解码功能于一身且支持多制式解码,且内部含有I2C接口,可简洁的通过I2C总线对其工作方式进行设定。
在本系统中,主控芯片TMS320DM355通过I2C接口与SAA7111A的双向数据线SDA和时钟线SCL连接,对SAA7111A的工作方式进行设置,并向其发送地址码和控制量,控制SAA7111A完成视频的转换,并将转换后的信息通过双向数据线SDA串行读入,然后进行分析、处理,并产生各种控制信息。
TMS320DM355处理完采集的数字信号后产生适合的控制信号来控制舵机和电机,从而完成机器鱼的自主运动。同时TMS320DM355又可以将处理后的数字信号通过无线电发送转置发送到岸上的主机。
3 系统的软件设计
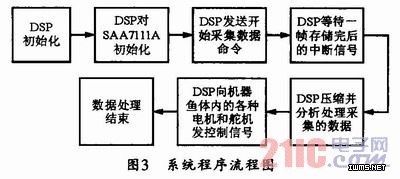
对该系统的软件设计流程如图3所示。在本系统的软件设计中,系统上电初始化DSP,通过软件模拟I2C总线时序,向SAA7111A发送写信号,设置SAA7111A的工作方式,具体流程为:DSP发出一个SAA7111A的地址(0xBA或0xBS),并表明写操作,等待SAA7111A响应,DSP接收到SAA7111的响应后,再发出要配置寄存器的地址,等待SAA7111A响应,并在接收到SAA7111A的响应后,发送要配置的数据,之后等待SAA7111A响应,接受SAA7111A的响应,发送停止位后,结束一次配置。设定其工作寄存器,使其输入的视频格式为PAL式,且设定输出的数据流为8bit。之后DSP发送开始采集信号及对SAA7111A的控制信号。开始采集视频信号并实现A/D转换。当一帧数据写入帧缓存后,DSP即产生中断,先关闭SAA7111A的视频输出,然后对采集的信号进行分析处理。处理完后根据结果产生各种控制信号控制机器鱼中的各种电机和舵机,具体做法就是通过控制输入到各个电机和舵机的控制信号的占空比实现电机转速和舵机角度的控制,从而实现机器鱼游动方向和速度的控制,实现机器鱼的自主运动。当DSP完成控制命令后就控制SAA7111A,并重新发送开始采集命令,继续采集下一帧。
4 结束语
本系统设计将图像采集与识别、运动控制集成到一个系统中,能很好实现图像的快速采集、存储及数据处理功能,也实现了鱼体的自主运动控制,即使对于高分辨率要求的鱼体游动的前方数据(如障碍物等)也起到很好的采集与处理的功能。若将该系统配上更为优化的程序,可以实现鱼在水体情况较为复杂的环境下的自主运动。若再配合无线收发装置便可将鱼体在水下采集的数据发给地面处理机,供研究人员分析,那么这样的机器鱼就可以应用到实际工程中了。





