・上一文章:STM32直接驱动RGB接口的TFT数字彩屏设计
・下一文章:基于MiniGUI的数字加密电话系统GUI设计
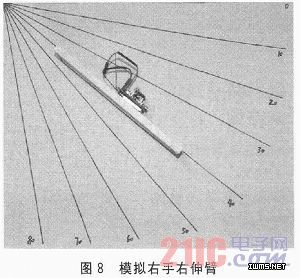
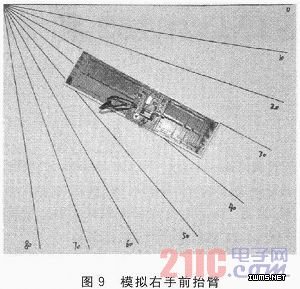
在0~90°范围内2种情况下,三轴测量角度与参照角度比较。表1为模拟右手右伸臂时三轴角度与参照角度比较。表2为模拟右手前抬臂时三轴角度与参照角度比较。由表1、表2可以看出:除个别接近0、90°时误差较大外,大多数角度测量的误差绝对值小于1.5°,与ADXL345官方说明文件的误差小于1°较为相符。
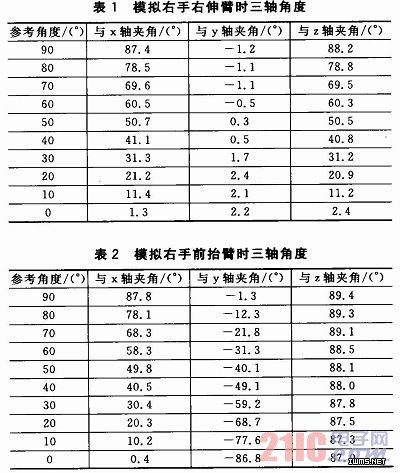
表中负值为传感器坐标轴正方向与自然坐标轴正方向夹角超过90°情况。误差超过1°产生的原因有如下几方面:
①在电源设计时没有为ADXL345的ADC单独设置参考电压源,而是使用VDD系统电源,存在一些纹波干扰,造成误差。
②没有对传感器进行零点标定,水平放置时X、Y轴输出并不为0。
③缺少专业角度测量设备,角度参考图使用普通量角器制作,参考角度与实际角度。
④传感器平面与电路板平面、实验面包板平面不完全重合,存在固定夹角,测量时有误差。从表1的Y轴夹角看出,理论上模拟右手右伸臂时Y轴夹角应一直为0°,但现实中出现了一个转角,使输出逐渐由-1.2°过渡到2.2°。
结语
本文通过使用加速度传感器ADXL345采集人体动作信息,使用nRF24L01无线时频模块发送数据,最后通过USB芯片CY7C68013将数据上传给PC机,并在PC机上实时绘制人体运动动画,构建了一种人体动作信息测量设备。测量身体各部位角度典型误差小于1.5°,满足普通人机交互需要。目前已经根据上述原理制作出样品,PC机上显示人体模型与佩戴测量模块的实际人体动作较为一致,反应灵敏,可以满足快速实时的人机交互过程的实现。在进一步减小输出误差,稳定输出结果后,可以应用于高危环境机器人控制、游戏娱乐等各种人机交互场合。





