・上一文章:嵌入式系统中从串配置FPGA的实现
・下一文章:QPYD系列液晶显示控制板接口技术及测试程序
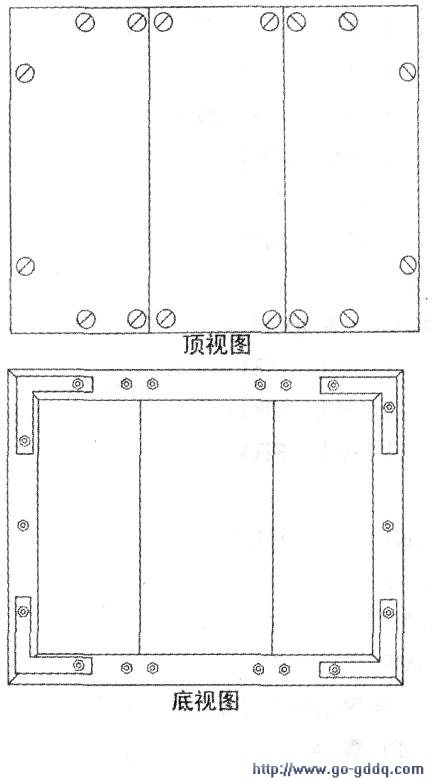
在底座的左1/3处装一块4(3/16)x9英寸的加强板,装这块加强板时暂时把拐角处的螺丝松开,如果需要的话可以在板上打一些螺丝眼。中间和右边的也按着上面的方法做。当这三个加强板全放好位置之后,拧紧所有的螺钉。在拐角内侧多钻一些螺丝孔来保证这些金属板安稳地固定在框架上面(不要担心拐角处已经有好多螺丝固定了)。用大小为8/32和1/2的螺丝把这些金属板固定在自己的位置,完成后的框架应该如上图.下面看起来如下图。
电动机
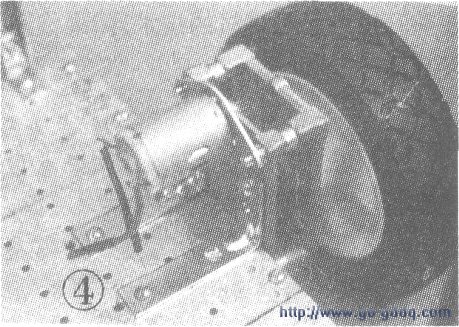
漫游机器人用两个电机驱动,分别用于移动和拐弯。电机固定在框架的中间,如下图所示。选择在中间是因为:这样台座各个地方所受的重量均匀。如果重心尽可能接近机器人的垂直中心,机器人就会少一些翻倒的危险。
样机中使用12瓦的电机已绰绰有余,也可以找一些其他电机代替。在漫游机器人样机中的电机内置的配套使用的变速箱,可使电机的转速降低到38转/分。轴长1/4英寸,轴上用1/4英寸20的板牙来套螺丝扣固定直径6英寸的割草机的轮子。如果你使用的轮子上面有螺纹,或可以在上面钻孔固定螺钉,那你可以跳过这一步。不管哪一种方法,一定要保证轮子相对于轴来说不要太厚.样机的轮子宽1( 1/2)英寸,适合的轴长度为2英寸。