・上一文章:嵌入式系统中从串配置FPGA的实现
・下一文章:QPYD系列液晶显示控制板接口技术及测试程序
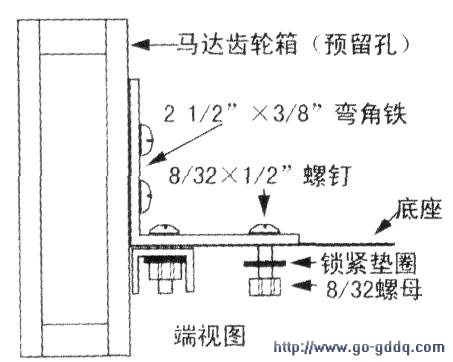
如下图所示,用两个2(1/2)×3/8英寸的角铁来固定电机。把角铁的一端切掉大约1英寸以与电机的框架相配。
用大小为8/32×1/2英寸的螺钉和螺母把角铁固定在电机上。,必须保证电机的轴垂直于框架的面,如果电机歪了,在地板上行动起来,机器人会一直偏向一边。要调整好电机的垂直度,通常需要在安装孔上花些工夫。
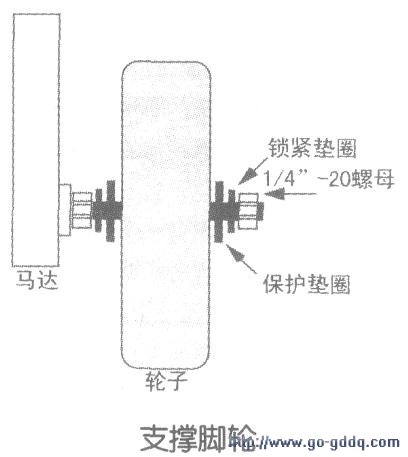
现在把轮子装上,如果轮子的毂相对于轴太大,可以使用缩小轴套。如果轴已经套好扣,拧上1/4英寸20的螺母。
如下图所示安装轮子的元件。一定要用锯齿锁紧垫圈,否则轮子可能松开或丢掉。按同样的步骤安装另一个电机。