・上一文章:嵌入式系统中从串配置FPGA的实现
・下一文章:QPYD系列液晶显示控制板接口技术及测试程序
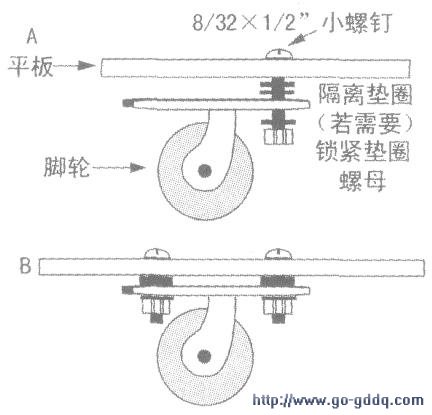
支撑脚轮
最后,漫游机器人后部必须用旋转脚轮的支撑。使用一个直径为2英寸的全方位旋转脚轮。分别在左右两个加强金属板的底部钻上螺丝孔,以固定脚轮。用8/32×l/2英寸的螺钉和螺母固定脚轮(见下图)。你可以在脚轮支座和加强板之间垫上一些东西来使脚轮和驱动轮等高(样机中使用5/16厚的垫片)。按同样的方法安装另一个脚轮。如果你用的电机和驱动轮与上述不同,那你就得自己挑选合适的脚轮。换句话说,必须保证四个轮子同时着地。在为脚轮钻孔和安装电机和驱动轮之前,一定要测量好加强板和地面之间的距离,买适合的脚轮来搭配。当然,如果需要的话,可以加垫片。
电池
漫游机器人的每个电机在正常工作时需要1.5安的持续电流驱动,但为漫游者所选的电池必须能够让电机以2安的电流工作1到2个小时,高能量的镍一镉电池组能够满足要求。漫游者还可能增加其他一些子系统。不过由于这些子系统还没有设计,无法知道到底会消耗多少能量。最好的办法是选用那种能够提供比现在所需要的更多能量的电池。
通常可以使用在剩余品商店买到的6和8安一时的铅酸电池。约6安和8安的能力正好适用于这种间歇驱动电机的情况(各种电子子系统,像单板计算机和报警系统,通常使用单独的电源)。这种高负载电池通常典型的输出电压是6伏,所以需要两个电池来为电机提供12伏的电压。为线性集成电路,如线性放大器这样的电路供电的辅助电源,则采用单独的电池,如镍一镉电池供电。一组“C”型的镍一镉电池占据不了太多的空间,但最好提前为它们留出空间,总比以后安装子系统时再重新设计整合机器人要好。
主电池是可充电形式的,这样就不需要为更换电池而频繁拆卸。但还要考虑采用的安装方式在需要时便于拆卸电源。
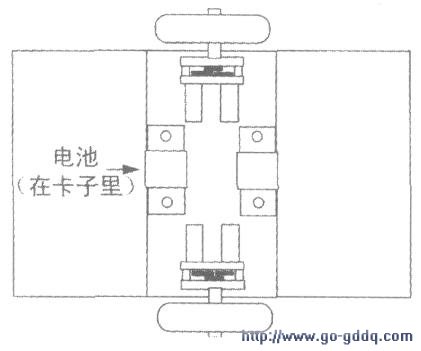
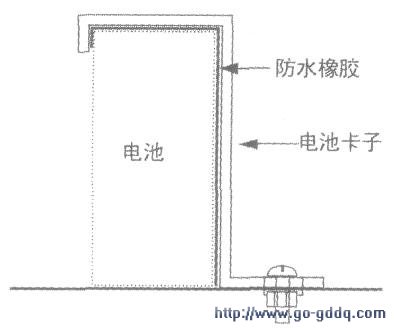
下图中所示的电池卡子可以方便地拆卸电池。这个电池卡子用宽1(1/4)的镀锌板制成,弯曲成适合电池的轮廓。在电池卡子内侧装的橡胶用来把电池固定住。
电池离两边轮子的距离相等,如下图。这样的布置使得重心刚好在中间。如果需要的话,缝隙处还可以放置一两个C型电池。