・上一文章:学习GAL应用设计的意义
・下一文章:T03高热散逸散热器
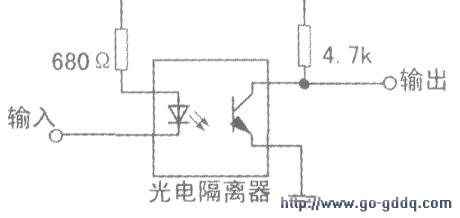
3.使用光电隔离器
请注意以上两个电路都有公共地。您可能需要使输入部分的电源和控制电路的电源完全分开。最容易的做法是使用现成的光电耦合器,其封装与lC封装一样。下图说明光电隔离器的基本概念:输入源控制发光二极管,而控制电路的输入端连至光电隔离器的光检测器。 请注意,由于光电隔离器的每一侧各有自已的电源,所以可以用这些器件来进行简单的电平移动,例如把+5Vdc信号变成+12Vdc信号,或者反过来。
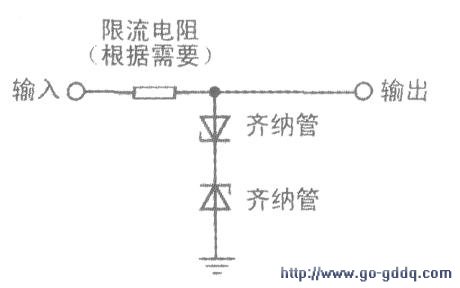
4.齐纳二极管输入保护
如果信号源可能超过控制电路的工作电压,您可以用一个齐纳二极管去钳住输入端的电压。齐纳二极管的作用如同阀门,只有在加到其上的电压达到某一值时它才导通。如下图所示,把齐纳二极管连接于输入端的+V和地之间,您基本上就可以把多余的电压旁路掉,防止它达到控制电路。
齐纳二极管有各种不同的电压标准;47或5.1伏齐纳管作为输入端接口保护是最理想的。选用的齐纳二极管瓦数指标取决于输入端上承受的最大电压和输入端流过的电流。对于大多数应用来说,源信号不超过12~15伏,因此,1/4瓦的齐纳管对付这种情况绰绰有余。流过的电流越大,就要用更大瓦数的电阻。
六、模拟输入接口
在大多数情况下,模拟输入的变化特性表明它们不能直接连至机器人的控制电路。如果您想对输入信号进行量化,您应使用某种形式的模数转换。
此外,您可能需要对模拟输入进行条件优化,使得其数值可以可靠测量。这包括对输入的放大和缓冲。
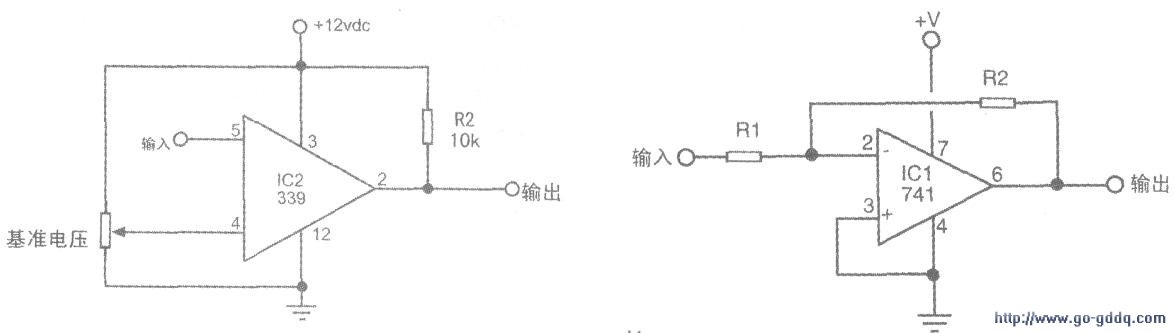
1.电压比较器
电压比较器接受线性的模拟电压,输出一个简单的通/断(低/高)信号给机器人的控制电路。如果您不想知道输入的电平有多少,而只想知道电平何时超过一定的阈值,则比较器对此易如反掌。
下图是电压比较器电路。电位器被用来确定比较器的转折点。为了调节好这个电位器,先把您想用作转折点的电压加到比较器的输入端,调节这个电位器,使比较器的输出刚好改变状态。请注意,比较器芯片( LM339)输出端接有上拉电阻。LM339采用开路集电极输出,这意味着它可以把输出拉为LOW(低),但不能拉为HIGH(高)。上拉电阻使LM339的输出可以拉高( HIGH)。
2.信号放大
许多模拟输入虽提供开与关的信号,但其电压幅度还不足以控制机器人的控制电路。在这些情况下,必须用晶体管或运算放大器对信号进行放大。在大多数情况下运算放大器的方法是最容易的,LM741可能是最常用的运算放大器。下图说明基本运算放大器用作放大器的方法。R1用来决定放大器的输入阻抗,R2用来决定增益。
")
")



