・上一文章:GPRS DTU的四个核心功能
・下一文章:电脑灯控台使用经验分享
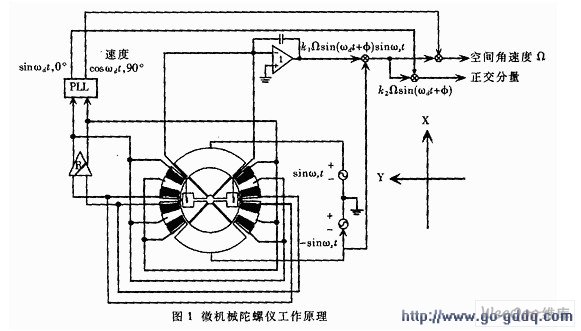
陀螺系统组成见图1,它由敏感元件、驱动 电路 、 检测电路 和力反馈电路等组成。在梳状静电 驱动器 的差动电路上分别施加带有直流偏置但相位相反的交流电压,由于交变的静电驱动力矩的作用,质量片在平行于衬底的平面内产生绕驱动轴Z轴的简谐角振动。当在振动平面内沿垂直于检测轴的方向(X方向)有空间角速度Ω输入时,在哥氏力的作用下,检测质量片便绕检测轴(Y轴)上下振动。这种振动幅度非常小,可以由位于质量片下方、淀积在衬底上的电容极板检测,并通过电荷 放大器 、相敏检波电路和解调电路进行处理,得到与空间角速度成正比的电压信号。
在科研及加工过程中,一个重要的内容就是检测 陀螺仪 的特性,如工作状态谐振频率、带宽增益、Q值等,于是就提出了微机械惯性 传感器 检测平台的研制任务。根据陀螺仪的工作原理,整个 仪器 包括两大部分:驱动信号发生部分和 表头 的输出信号检测部分。驱动信号发生部分对待测的惯性传感器给予适当的驱劝信号,使传感器处于工作状态。信号检测部分要求检测出微小电容变化,经过放大、解调处理后,将模拟量转换成数字量采集到PC机中,分析输出信号,以确定惯性表的特性。
")
")



