・上一文章:奔腾B50防盗指示灯闪亮,发动机不着车
・下一文章:谈有线电视机顶盒电源代换
晶振X1与U2A 17、18脚内部电路构成的振荡电路产生16.9344MHz时钟信号,用于数字信号处理。
U2② , 80 ,⑧脚与U2A 33,31,32脚构成数据通讯电路,U2⑩,①脚与U7A 54,55构成I2C总线,通过这两组通讯电路,微处理器U2对机芯电路进行控制,同时机芯电路也可向微处理器反馈各种检测信息。
2)加载电机控制电路
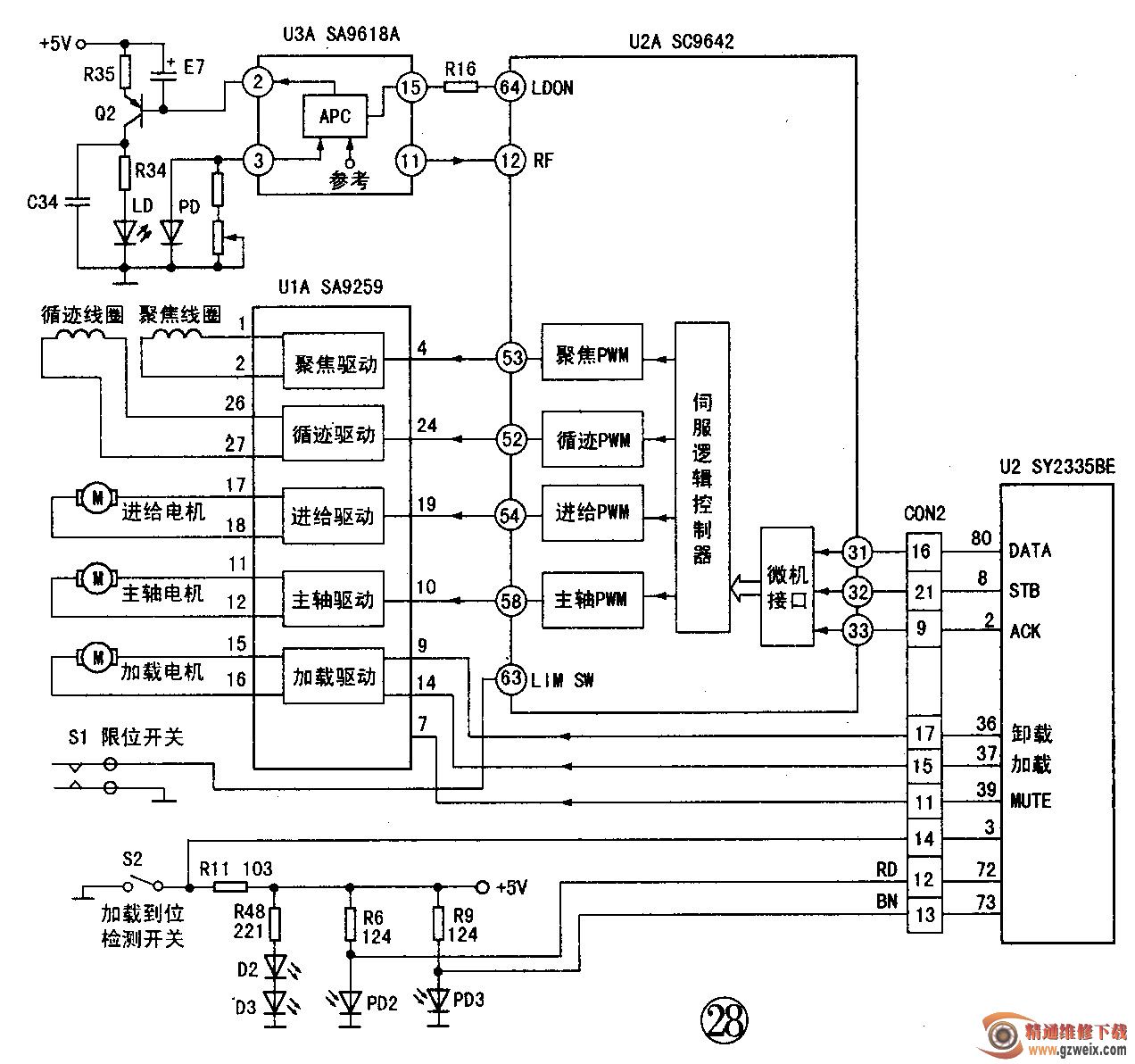
图28是加载电机控制电路和读盘控制电路。
当把CD碟片放入碟窗口时,“RD(预备)”检测信号(高电平电压)送至微处理器U2的72脚,微处理器使37脚(加载控制端)输出高电平,36脚(却载控制端)输出低电平,送到驱动块U1A,经驱动放大后,从15、16脚输出正向的加载电机驱动电压,控制加载·电机正转,加载机构中的滚轴组件将碟片吸入CD机芯内,光盘触动加载杆,从而带动小机芯(即带架的激光头组件)向上抬起,主轴电机随之被抬起,安装在主轴电机轴上的旋转盘将光盘顶起并压向夹持器,将光盘压牢。在小机芯向上抬起的过程中,加载机构带动一块塑料挡板向后移动,此挡板在旋转盘与夹持器将光盘压牢后触碰加载到位开关S2,S2闭合,U2的③脚变为低电平,微处理器U2便判断加载到位、于是发出制动停转指令,37、36脚输出停转制动控制信号(均输出低电平),使U1A的加载电机驱动器停止工作,加载电机停转。
出碟控制过程在系统控制电路中已介绍过了,这里不再赘述。
3)激光头复位控制
光盘加载结束后,微处理器U2与U2A通讯,将进给通、高速、正向进给等指令数据传递给U2A微机接口电路,经逻辑控制器处理成启动信号,送给PWM电路,从U2A 54脚输出PWM脉冲经低通滤波后送入U1A 19脚,产生的电机启动电压从17、18脚输出,进给电机加速转动。通过进给机构迅速将激光头组件向主轴方向移动,碰压限位开关S1使其闭合。此信息从63脚送入U2A,再由U2A与U2通讯,产生反向进给指令,传送给U2A,伺服逻辑控制器便产生高速、进给、反向进给控制信号,经PWM电路输出,由U1A输出电机反转驱动电压,进给电机反转,驱动激光头迅速返回零轨位置而制动。接着,微处理器便向U2A发出聚焦搜索和激光二极管接通控制指令。
4)激光二极管初始发射控制
每当激光头复位后,U2A将接收到的“LD ON”(激光二极管接通)指令处理成高电平控制信号,从砂脚输出送入U3A的15脚,APC电路启动,从②脚输出激励电压,经Q2驱动放大后,送至激光头,使激光管LD点亮,发出激光,经物镜聚焦成识读光点开始读盘。在播放节目结束或无盘的情况下,U2A将Q2设置成截止状态,停止激光发射。
5)聚焦访问引入和主轴粗馈控制电路
每当激光头复位后,U2A内微机接口电路便将接收到的聚焦访问指令送到伺服逻辑控制电器,处理成聚焦搜索控制信号,经PWM电路从53脚输出。经U1A变换成聚焦搜索驱动电压,从①、②脚输出,加于聚焦线圈。驱动物镜上下移动调整焦距,并在其过程中引入聚焦,通过U2A内部的FOK检测电路产生FOK(聚焦正确)检测信号,并转换成数字信号,此数字式FOK信号由U2A通过数据通讯电路提供给微处理器U2,微处理器据此向U2A的微机接口发出主轴启动和聚焦与循迹伺服接通等指令。伺服逻辑控制器产生主轴启动,加速控制信号,经主轴PWM电路从58脚输出送入 U1A⑩脚,经驱动放大后,从11、12脚输出主轴电机驱动电压,主轴电机启动,加速旋转,利用刻录在光盘上的位时钟信号和主轴线速度检测器,主轴伺服电路自动进入伺服状态,准确识读光盘上的信息。




")
")