・上一文章:福克斯轿车倒车雷达不能正常工作的检修方法
・下一文章:上汽荣威R750轿车发动机防盗指示灯的控制
(二)制动系统
新皇冠所有车型的制动系统均标准配置了带EBD的 ABS、BA(辅助制动)、TRC(牵引力控制)、VSC(车辆稳定控制)和HAC(坡道起步辅助)系统。在搭载3GR-FE和3UZ-FE发动机的中高配置车型中,还采用了VDIM (车辆动态综合管理)系统。
1. VDIM (车辆动态综合管理)系统
(1)VDIM控制管理的概念
传统的制动控制系统中,ABS、TRC和VSC是独立控制的,而VDIM控制理论是一个整合ABS、TRC及VSC的控制系统。各系统在VDIM的管理下协调一致的工作,实现平稳的车辆控制。
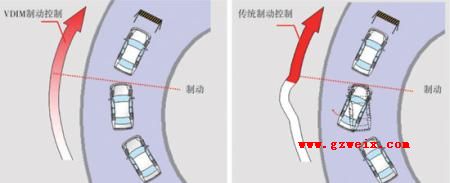
下面本文就车辆发生制动侧滑这种现象,对传统制动系统和VDIM系统进行一下比较。
传统的制动控制系统通过所接收到的车辆偏航率及减速度传感器、车速传感器和转向角度传感器判断车辆是否发生侧滑,当确认车辆即将发生侧滑时,启动VSA系统以使车辆稳定行驶。当车辆进行紧急制动时,制动控制系统启动ABS系统,以防止车轮发生抱死而侧滑;若发生侧滑则启动VSC系统进行稳定。VDIM系统同样是利用以上提到的传感器信号作为判断车辆行驶状态的依据,当检测到车辆即将发生侧滑时,VDIM控制ABS、TRC和VSC协调一致地工作,将车辆的不稳定行驶的因素减小到最低。从(图5)中可以看出,在VDIM系统的控制下,车辆行驶较传统制动控制系统更加平稳。
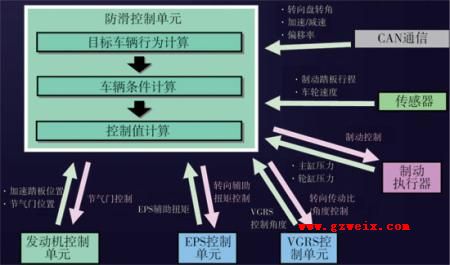
(2)VDIM控制原理
VDIM的控制原理如(图6)所示。
2. 制动辅助功能
防滑控制单元根据车速、制动踏板载荷感应开关及制动主缸压力传感器信号,判断驾驶员意图.当确认驾驶员需要紧急制动时,则增大制动执行器的制动压力。
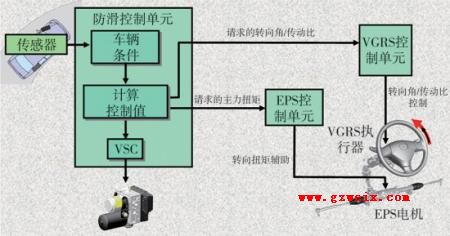
3. 转向协同控制功能
当防滑控制单元驱动VSC系统工作,该系统通过与可变齿轮比转向系统VGRS和电子转向系统EPS协调工作,改善车辆的稳定性(图7)。
三、车身电器系统
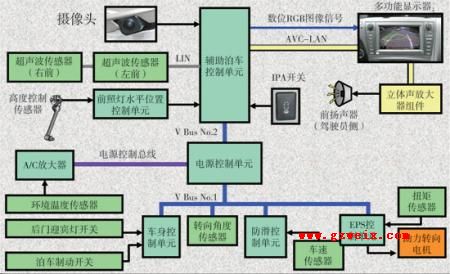
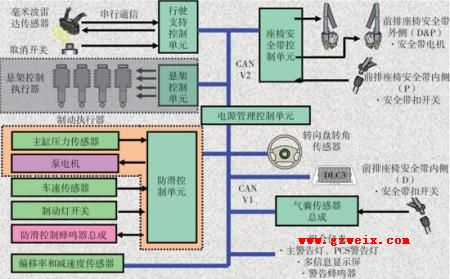
(一)MPX多路传输系统(车载网络控制系统)
新皇冠的MPX多路传输系统采用4种通信协议,包括:CAN、LIN、AVC-LAN和MOST。CAN用于发动机、底盘和车身电器系统的通信;LIN用于车身系统内部通信;AVC-LAN仅用于影音(AV)系统元件间的通信;MOST(面向多媒体的系统传输总线)用于影音(AV)系统元件间的通信。其中CAN有2种类型:HS-CAN(高速)和MS-CAN(中速)。具备网关功能的主车身控制单元和电源管理控制单元在CAN和LIN之间转换信号。
(二)智能泊车辅助系统IPA
智能泊车辅助系统通过查看后方视野和引导线辅助驾驶员泊车,并且能自动控制转向盘的转动达到目标泊车位置。
2. 智能泊车辅助系统工作原理
智能泊车辅助系统工作原理如(图9)所示,系统中的环境温度传感器信号用来校正超生波传感器探测的距离。
(三)预碰撞安全系统
新皇冠3.0 L以上车型配备有预碰撞安全系统,当碰撞将要发生时,预碰撞安全系统将分别操作相关的碰撞缓冲组件以帮助减少碰撞造成的损坏。在碰撞发生前,该系统将对车辆进行如下操作:收紧安全带、发出碰撞警告信息、进行制动辅助准备以及进行预碰撞控制制动。
1.预碰撞安全系统组成及工作原理
预碰撞安全系统的工作原理如(图10)所示。
(1)前部碰撞判断
行驶支持控制单元通过毫米波雷达传感器识别车辆前部的障碍物或车辆,然后通过根据车速、道路条件以及距离障碍物的距离,判断是否将不可避免发生碰撞。
(2)紧急制动判断
防滑控制单元一旦发现车辆进行紧急制动,则执行安全带预紧操作。对紧急制动的判断是通过制动液压力和制动主缸压力传感器的信号做出的。
(3)车辆失控判断
当车辆存在很大的失控可能性的时候,安全带预紧同样会被启动。控制单元是通过车辆偏航率传感器和转向角度传感器的信息来判断车辆是否将要失控。
2.毫米波雷达传感器(图11)

毫米波雷达传感器可通过反射的雷达波检测距离、相对速度和目标方向,传感器回路由1个发射器天线和9个接收天线组成。更换或拆装该传感器后, 需进行雷达波束轴线调整。
毫米波雷达传感器的调整步骤如下。
① 利用水平仪检查和调整雷达传感器的垂直方向。
② 使用智能检测仪检查SST位置。
③ 使用智能检测仪检查和调整雷达传感器的水平方向。
④ 使用金属物(如铝板)重置雷达传感器的学习值(可使用智能检测仪自动重置学习值)。
⑤ 利用水平仪再次检查和调整雷达传感器的垂直方向。
")
")
")
")

