・上一文章:不同型式的汽车发动机气缸套特点及装配
・下一文章:分析及检修丰田卡罗拉1.6GL双可变气门正时系统(三)
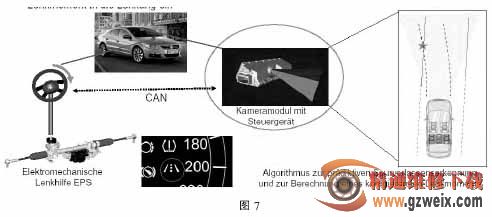
1)系统原理
该系统是基于图像处理以及图像识别技术的,属于图像识别技术在汽车上应用的先例。如图7所示,该系统主要由传感器及负责图像处理的控制器构成。传感器安装在前风挡玻璃上方,采集车前方20~60m的道路的图像并发送给控制器。控制器根据得到的图像提取出车两侧的车道线,并将车道线与车的行驶方向进行比较,当存在交叉时,控制器认为车辆已经或者正在偏离正确的车道。当方向指示灯打开时,该功能关闭。
2)系统的使用条件
该系统对车速以及道路环境有一定的要求,大众集团的车道保持系统要求车速必须大于65km/h 系统才可以激活。对于雨雪天,路面标示线不清晰以及过小的拐弯半径,该系统均不能工作。此外,该系统会监测驾驶员双手是否脱离方向盘,如果检测到驾驶员双手均已经脱离方向盘,系统自动关闭。
3.全景监视系统
全景监视系统,顾名思义就是能够监视车辆周围所有相关的情况。其主要的结构就是在车的前后和左右各装配一个传感器,同时将各个传感器的图像数据进行拼接,以达到鸟瞰的效果。目前该系统主要在部分日系车上装备。其摄像头的位置如图 8 所示。显示效果如图9所示。车子在前进或倒退时,左侧屏幕会显示直接拍摄到的直观影像;同时,结合右侧的“全景式影像”,就可以100%觉察周围障碍物。车速在7km/h以下时就会自动起动,超过这个速度屏幕就不显示监控影像。

全景式监控主要是利用了图像拼接的技术,使图像更加直观。不过在“全景式”监控的图像系统中也存在一个问题,4 个摄像头的图像拼接而成的组合全景图像,因为拍摄部位有重叠,会产生一个实际物体、多个影像反馈的“假象”,也就是所谓“鬼影”的存在。类似这种情况,需要驾驶根据具体情况判断。另外一个比较突出的问题是,4 个摄像头并不能完全覆盖整个的区域,在靠近车辆的部分仍然存在一定的盲区,这也是驾驶员在使用该系统时必须注意的地方。
4.红外线视觉系统
红外线视觉系统有别于传统的视觉系统,简单来说,红外图像传感器就是利用红外灯在黑暗的光线条件下实现视频监控的,红外图像传感器技术分为被动红外摄像技术和主动红外摄像技术。
被动红外图像传感器技术是利用任何物质在绝对零度(-273℃)以上都发射红外光的原理,人体和热机发出的红外光较强,其它物体发出的红外光相对微弱,利用特殊的热红外夜视仪可以实现夜间监控。但这种特殊的热红外夜视仪造价昂贵,而且不能直观、清晰地反映周围环境状况,因此在通常的夜视系统中较少被采用。
主动图像传感器技术,即利用红外灯来产生红外辐射,发出人眼看不见的红外光去照射景物和环境,即可使用普通低照度CCD 黑白摄像机或“白天彩色夜间自动转黑白”的图像传感器或“红外低照度彩色图像传感器”去感受周围景物反射回来的红外光,从而实现夜视功能。
与目前的照明系统相比,红外夜视也具有一定的优势。实际上最明亮的氙气大灯也是有一定照明范围的,在光线范围外依然是视线盲区,而夜视系统是利用红外成像,车头前方均为覆盖范围,几乎没有盲区,因此更加可靠。目前宝马,奔驰,奥迪C7/D4均有装备。
奔驰S 级轿车采用了液晶仪表盘,因此驾驶者方向盘后的区域不但是速度和转速的显示区,更可以向驾驶者传达丰富的车辆信息,而在夜晚时就可以变为夜视系统的显屏。 由于屏幕位置就在驾驶者的眼前,所以观察起来非常方便,但奔驰S级的夜视系统必须在开启前大灯的时候才能工作,这是它的局限性。相比下宝马7系全系标配的夜视系统就没有使用条件,进入隧道或地下车库等光线较暗的地方时都可不开大灯就直接使用夜视系统,但由于红外投射影像出现在中控台液晶屏上,所以在观看时就不如奔驰 S 级那样的方便。
5.自动泊车系统
自动泊车系统是利用车尾摄像头,将车辆后方的路况呈现在中央显示屏中,驾驶员通过触摸屏把代表车身的方块在屏幕上随意移动,如果位置合适,方块将由红色变成绿色。此时只要挂入倒挡,控制好车速就可以完成自动停车了。雷克萨斯的泊车系统既支持平行泊车,也支持倒库泊车,而且还带有视频辅助功能。
目前的自动泊车系统,还不完全属于后视系统完成的功能。在整个倒车过程中,系统仍然需要依靠其它传感器获取距离与车的位置信息。但是该功能是通过对图像的处理,来寻找停车位置,从而实现自动泊车的功能。
二、未来图像传感器的关键技术
近几年来,图像处理技术在各个领域都有了长足的发展,但是由于汽车对于图像处理的运算速度、功耗、体积以及可靠性都有着非常苛刻的要求,因此目前在汽车上应用仅限于一些比较简单的功能。随着技术的发展,越来越复杂的图像处理将成为未来图像传感器在汽车领域应用的主流。根据目前的发展,视觉测量,图像拼接以及图像识别将是非常重要的发展方向。这几个方向目前在车上已经开始应用,但是局限性很大。
自动泊车功能可以看作是视觉测量的应用,但是该功能还仅仅是单镜头二维数据的测量,需要驾驶员的参与完成很多的前期工作,同时在整个倒车的过程也是由其它系统来负责完成测量的。
图像拼接技术的典型应用是全景监视。该功能已经实现并且批量生产,但是如何提高拼接部分的误差,减少盲区以及鬼影的存在仍然是一个比较重要的课题。
图像识别将是未来实现无人驾驶的关键技术,一旦图像识别技术能够实现三维视觉的重建并对绝大多数的障碍物,行人以及交通标示进行识别,结合目前的导航技术,自适应巡航技术,车辆完全可以实现无人驾驶。目前应用的实例是车道保持技术。该技术能够得到应用也主要是因为二点,一个是因为车道线的识别及测量均可通过二维数据可以实现,另外一个就是车道标示线的提取和识别相比较其它交通标示要容易的多。下面就上述的3种关键技术做一个简单的介绍。
1.视觉测量
视觉测量未来应用的前景非常广阔。其一视觉测量的实现,可以使后视系统完全取代超声波停车辅助系统,可以测量视野内障碍物的距离并给出声音提示。目前德国大众目前尚未投产的一款系统可以给出障碍物与车的距离。另外一点应用,就是快速准确的测量与前车的距离,将可以实现车辆的碰撞预警,避免追尾事故的发生。
视觉测量的实现至少需要2 个摄像头才能实现。一般采用的方法是用 2 个摄像机从不同角度同时获取目标物体的2 幅数字图像,基于视差原理,在已知 2 个摄像机之间的位置关系和摄像机本身固有参数的基础上,恢复出目标物体的三维空间信息,并进一步重建目标物体的三维形状与空间位置。随着跨学科基础研究的不断深入和计算机性能的迅速提高。直接模拟人类双眼处理景物的方式,简便可靠,在许多领域均极具应用价值。
")
")
")
")

