・上一文章:纯电动教练车动力系统匹配设计与试验
・下一文章:检修天籁前照灯、驻车灯、尾灯、前雾灯开钥匙后一直亮故障
3 Audi A8主动巡航系统构成
Audi A8主动巡航系统构成如图14所示。车距传感器和车距调节控制单元安装在同一壳体内(图15),通过支架上的调节螺栓可以调节车距传感器的安装位置。


Audi A8采用调频连续波(FM-CW)毫米波雷达进行测距,该种雷达结构简单,其基本工作原理是:毫米波雷达(车距传感器)天线发射连续的调频信号(一般为连续三角形波),当遇到前方障碍物时,会产生与发射信号有一定延时的回波;通过雷达天线接收回波信号,车距调节控制单元处理这些雷达信号以及其他输入信号;通过处理这些信号就可以确定雷达视野中出现的物体哪一个是相关的前车,即本车按其调节车距的那台车,于是前车的位置、车速及当前的车距就可以确定,确定的数据被发送到多点喷射控制单元、自动变速器控制单元以及ESP控制单元。同时,通过车距调节CAN总线和数据总线诊断接口(网关)传送到驱动CAN总线上。毫米波雷达具有探测距离远、运行可靠、测量性能受天气等外界因素的影响少等特点,可以获得主车与目标车辆间距离、相对速度、相对位置等信息。
4主动巡航系统工作原理概述
下面就以Audi A8主动巡航系统一个典型的调节例子来概述其工作原理。
1)如图16所示,A车驾驶员已经激活主动巡航系统,并选定了巡航车速:和巡航车距d, A车已经加速到了选定的巡航车速。

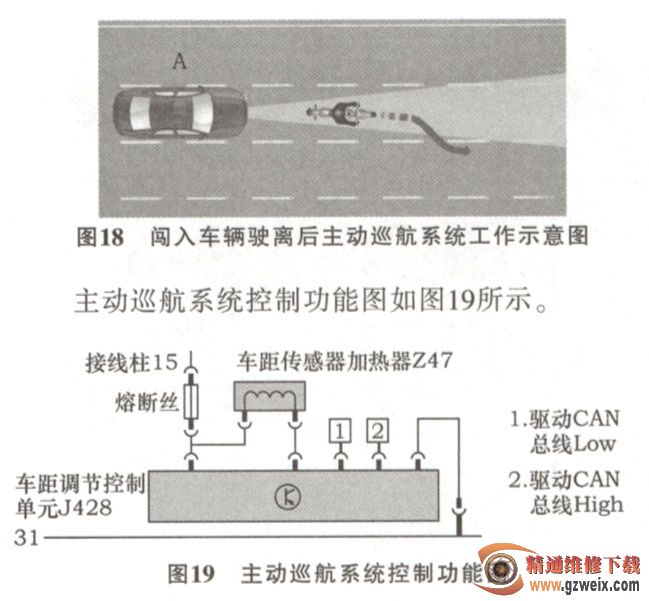
主动巡航系统控制功能图如图19所示。
2)如图17所示,这时如果有另一辆车(摩托车)闯入A, B两车之间,那么主动巡航系统施加的制动就不足以使蓝车和摩托车之间的距离达到设定的巡航车距(主动巡航系统出于舒适性的考虑,制动力只能达到制动系统最大制动减速能力的25%),于是就有声、光报警信号来提醒驾驶员,应踏下制动踏板实施制动。

3)如图18所示,如果前车驶离车道,那么雷达就会检测到这一情况,于是A车又开始加速,直到达到设定的巡航车速。
")
")
")
")

