・上一文章:哪些方法可以降低柴油机燃油耗油量?
・下一文章:起亚福瑞迪发动机故障灯亮
2智能刮水器控制系统软件设计
系统软件设计采用模块化设计方法,系统程序由主程序模块和子程序模块组成,主程序通过调用子程序完成数据处理。系统主程序流程图如图7所示。系统开始运行后,采用查询方式查询当前档位信号,并根据检测到的档位信号执行相应的子程序,如此循环往复。在停止档或间歇档时,为保证驾驶员的前方视野不被刮杆档住,系统不断检测刮水器回位信号,通过回位子程序使刮杆回位到风窗玻璃底部。
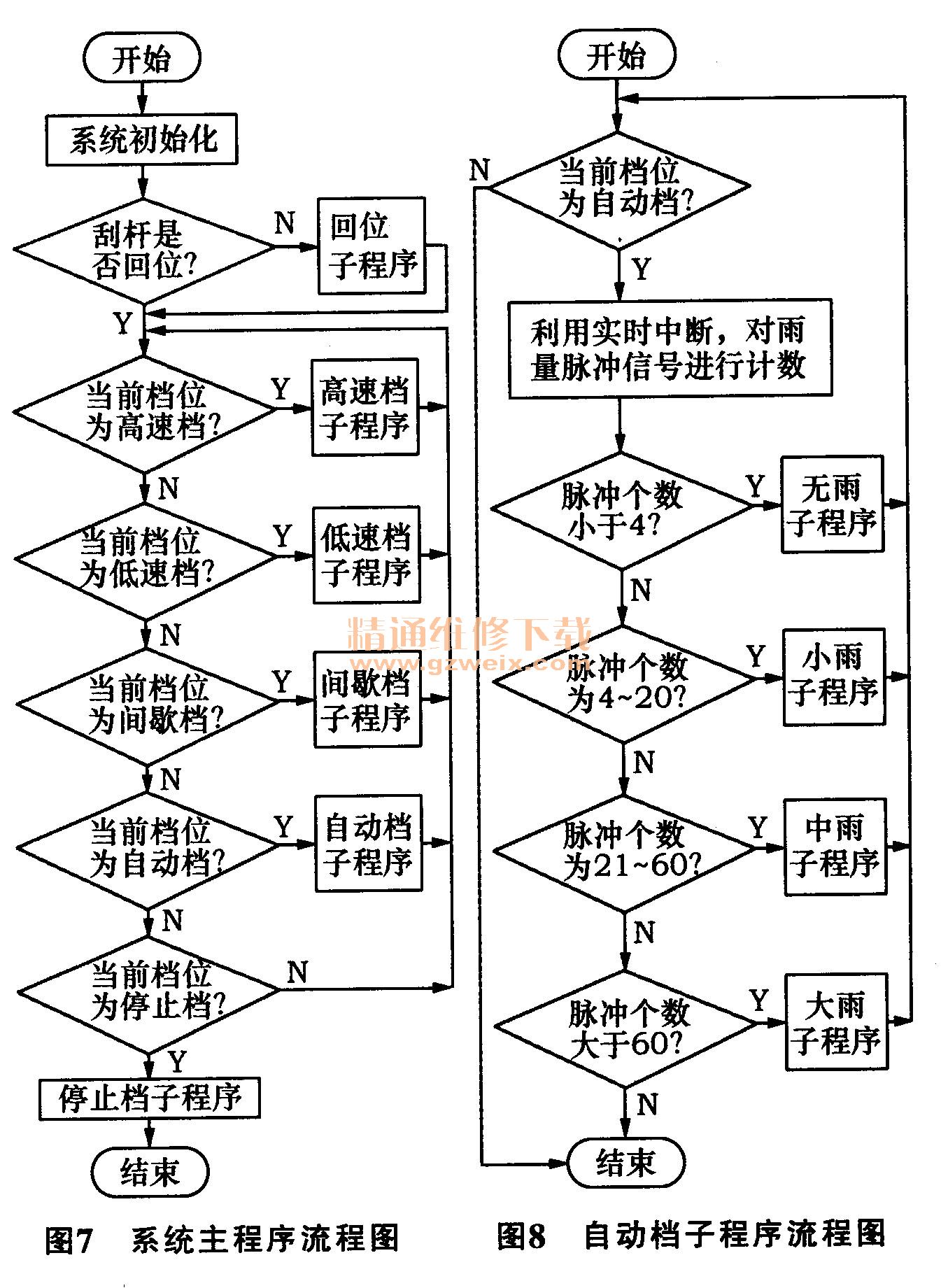
自动档子程序流程图如图8所示,通过利用单片机的RTC的实时中断功能,实现对雨量脉冲信号计数。当检测到自动档时,开始对雨量输人引脚PTA6的脉冲信号进行计数,并根据所计数值的大小执行相应的子程序。无雨时,输出占空比为0的PWM信号控制刮水电动机;小雨时,输出占空比为50%的PWM信号;中雨时,输出占空比为75%的PWM信号;大雨时,输出占空比为100%的PWM信号。雨量传感器仅仅是用来感知有没有降水发生,对降水的强弱及数量无严格的要求,雨量的界定可依据经验值设定。
3试验结果与分析
利用Prote199SE软件,设计并制作了刮水控制器双面PCB电路板,如图9所示。同时,利用单片机开发软件CodeWarrior6.3进行了系统软件的设计。整个系统研制完成后,在汽车刮水电动机上进行了相应的试验。
试验测试结果表明,手动档时,该控制器可分别实现刮水器在低速档、高速档和间歇档工作;自动档时,通过改变雨量的大小,刮水器能自动跟随雨量大小而改变刮杆的摆速。
4结束语
本文介绍了汽车智能刮水器控制系统软硬件的设计过程。运用单片机MC9S08DZ60输出的PWM信号调节刮水电动机的转速,编程实现了刮水器的手动控制和自动控制,电路简单,使用灵活。该系统性能可靠,控制效果良好,有效地提高了雨天驾驶的安全性与舒适性,具有广阔的应用前景。
")
")
")
")

