・上一文章:广汽理念L13A3 1. 3L/L15A1 1. 5L发动机正时校对方法
・下一文章:汽车发电系统的发展与设计思路
4 防夹控制算法实现
防夹控制可以避免意外夹伤事故,同时也保护电机。在防夹区间和防夹力方面,欧洲和美国都有相应标准,根据美标FMVSS118和欧标74/60EEC规定,常见的防夹区域出现在上密封条下沿4~200mm区间。在室温22℃和14.5V的工作电压条件下,用10N/mm的测量仪测量的上升防夹力应小于100N。试验表明,电机的转矩和电流成正比,BTS7960电流采样引脚IS采集的电流能真实反映电机受力情况,可作为判断车窗是否遇堵的重要依据。系统利用这一特性选择基于电流的防夹控制算法。
从图6波形对比图看出,无论是上升中受阻时还是升至顶部时,电机电流都有明显提升,由此可设定电流阈值I受阻,当I实际≥I受阻(I正常<I受阻<I堵转)时认为上升受阻或已升至顶,I受阻的大小将决定防夹力大小。再对比图6a和图6b,可发现两种情况电流
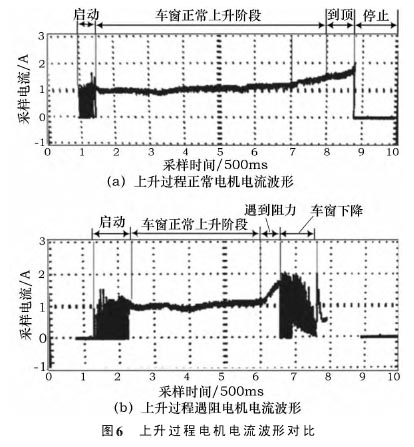
提升的斜率存在差异,由此可设定斜率阈值f受阻予以区分。当f≥f受阻时为上升中受阻;当0<f<f受阻时为已经升至顶部。车窗升降速度是固定的,如果还没到顶就发生电流跃变,时间上也会有体现,因此设定到顶时间阈值T到顶,当T<T到顶,说明上升中遇阻,反之说明已升至顶。不同车型的T到顶没有统一值, 通过试验初步确定,在运行中参照写入ROM中的实际到顶时间不断调整,实现自适应性。
综上,当I实际≥I受阻&f≥f受阻&T<T到顶时,上升中受阻;当I实际≥I受阻&0<f<f受阻&T≥T到顶时,升至顶部正常停止。采用3组判据,可以确保防夹判断的准确率,提高车窗安全系数。
5 结束语
基于CAN总线的智能电动车窗系统符合车窗智能化和车身网络化两个发展趋势。该系统以4窗车型为例进行结构布置,CAN总线的引入使其具有较强扩展性,只要增减节点就能适用大部分车型,充分利用CAN布置灵活、可靠性高和共享数据资源等特点。该系统与传统控制方式相比具有线束较少、结构简单和维护方便等优点,具备电动车窗基本功能和电机保护功能,同时采用基于电流的防夹控制算法,提高安全智能性。经过软硬件设计和模拟试验,系统工作可靠、功能实现良好、性能稳定,初步具备实车装配条件。
")
")
")
")

