新一代在线充电系统车辆充电过程如图5所示,具体步骤如下。
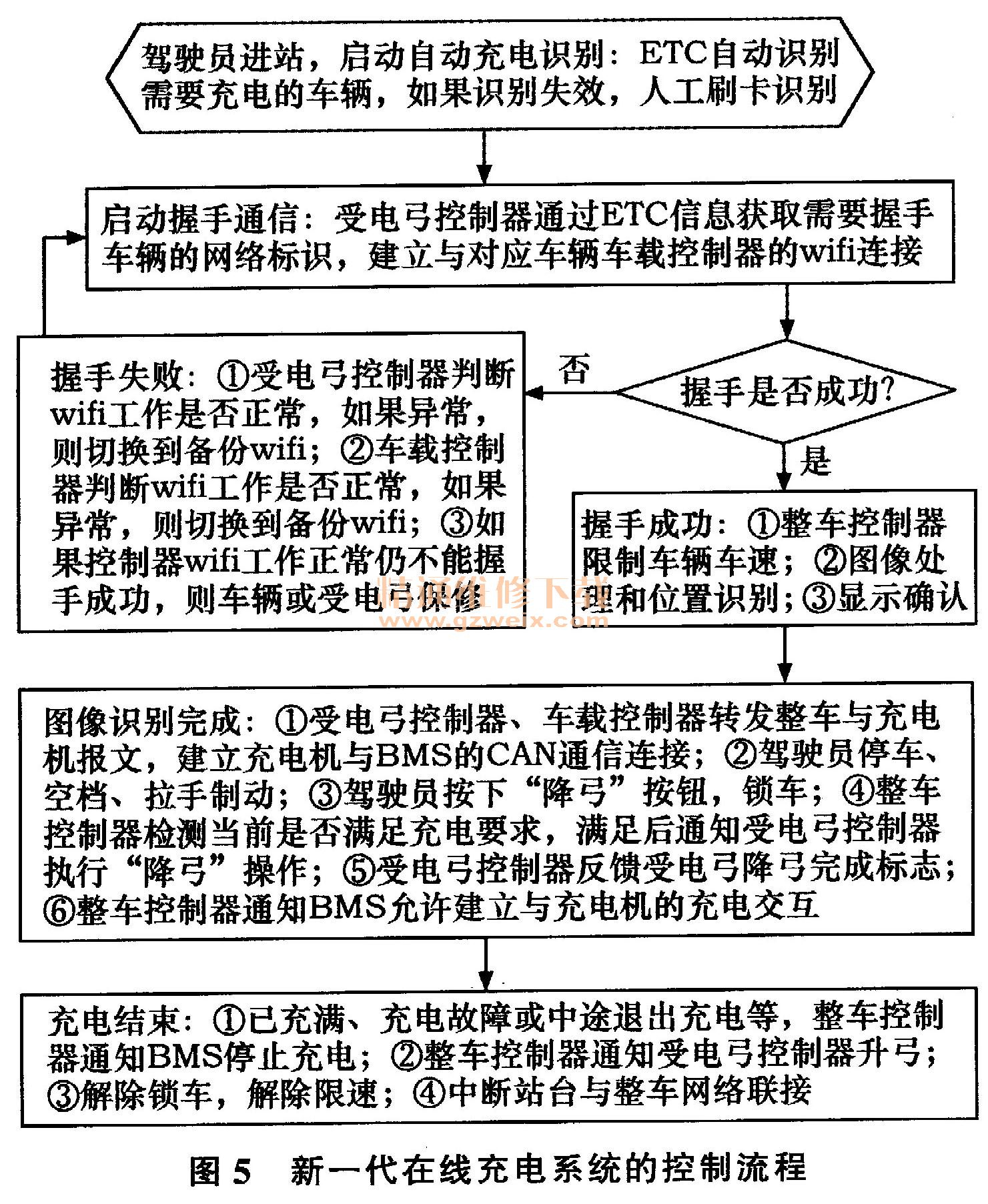
1)车辆到站,进入充电系统无线网络覆盖范围,自动建立无线连接,此时车辆未获得充电权限,不能激活充电请求。
2)车辆需要充电时,驾驶员驾驶车辆进入充电通道,位于充电通道前方或上方的ETC装置识别车辆标识信息。
3)车辆标识信息包含车辆顶置控制器无线模块地址,受电弓控制器查询地址对应的网络节点,建立与节点的握手连接。
4)握手成功后,整车控制器限制车辆最高车速,受电弓控制器采集车顶图像信息进行轨迹识别与驾驶行为提示。
5)受电弓控制器、车载控制器实现无线路由功能,转发充电机数据与整车数据,整车控制器、BMS建立与充电机控制器的无缝CAN网络连接。
6)车辆驾驶到位后,驾驶员完成停车、到空档、拉手制动操作;待车载显示终端提示充电允许信息,驾驶员按下“降弓”按钮;整车控制器识别该动作并发送到受电弓控制器,实现降弓操作。
7)受电弓控制器反馈降弓完成标志,整车控制器通知BMS允许充电,BMS自行开始与充电机的充电过程确认。
8)识别到充电完成或退出信息,整车控制器通知BMS退出充电。
9)检测到驾驶员取消“降弓”按钮,待充电电流降至安全范围,整车控制器通知受电弓控制器实现升弓操作。
10)升弓完成,驾驶员驾驶车辆缓慢离开;当超出无线网络覆盖范围,车辆自动退出充电模式,取消低速限制。当新的车辆识别信息到来或与当前充电车辆失去网络连接后,车载控制器切断已有充电连接,等待新的充电任务。
2.3新一代在线充电系统的关键技术
2.3.1受电弓动力学控制
包括受电弓翻转运动、极板压紧运动。
1)翻转运动指升降弓操作,既要保证快速升降以减少总充电时间,又要在运动末端减速以缓冲受电弓与极板接触时的冲击力,从而避免支架变形损坏。其理想运动曲线如图6所示。

2)极板压紧运动就是在车辆出现较大的俯仰、侧摆或道路不平的情况下,对受电弓与车顶间导流极板施加一定的正压力,保证上下极板有足够的接触率,从而满足大电流通电要求。该正压力又不可过大,否则导致铜质极板变形。
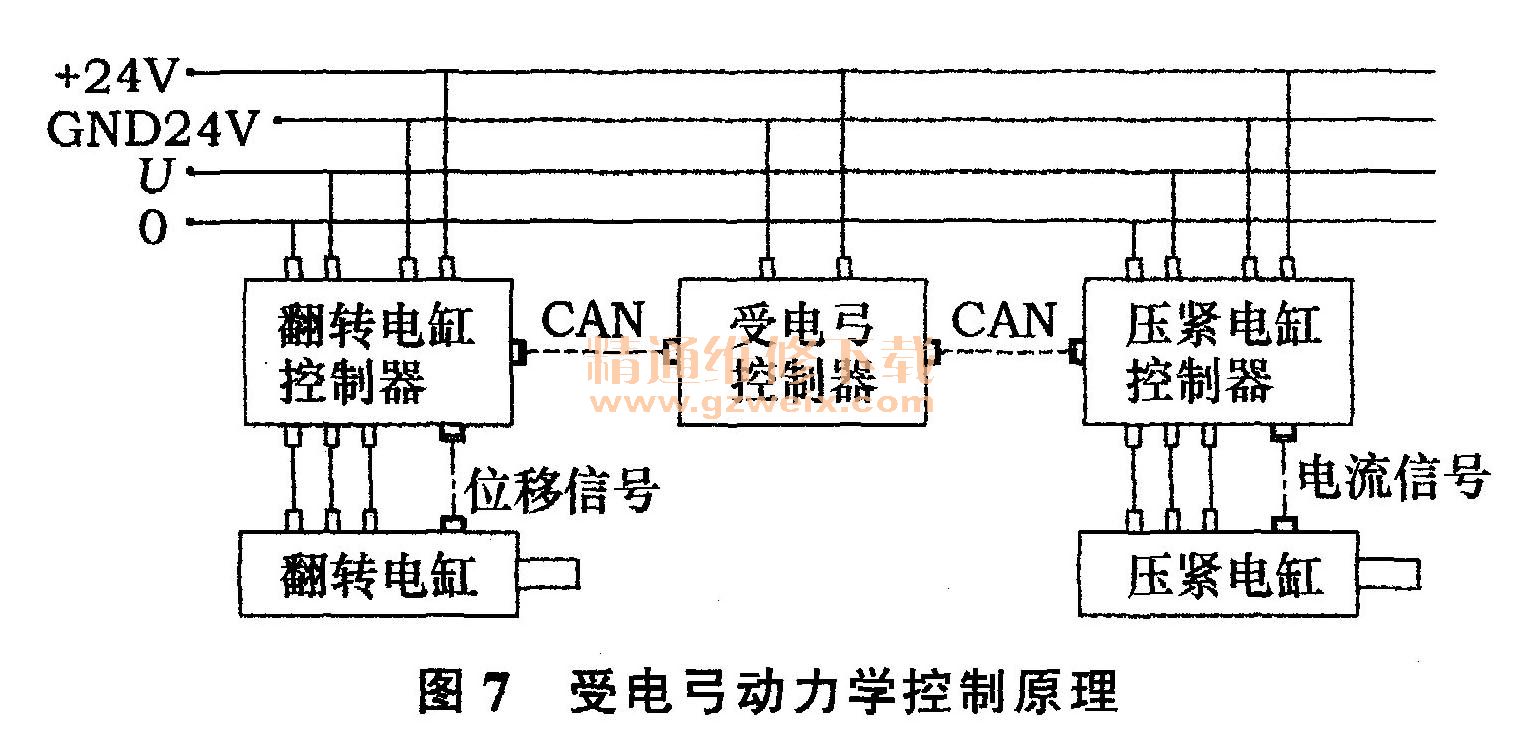
3)受电弓动力学控制原理。采用将伺服电机与丝杠一体化集成产品的电动缸作为执行元件,将伺服电机的旋转运动转换成直线运动,通过CAN总线与闭环控制,从而实现高精确位置、速度与推力动作。如图7所示。
上一页 [1] [2] [3] [4] 下一页
")
")
")
")

