・上一文章:大众途安车喇叭长鸣
・下一文章:柴油重型载货汽车京V电控及后处理技术
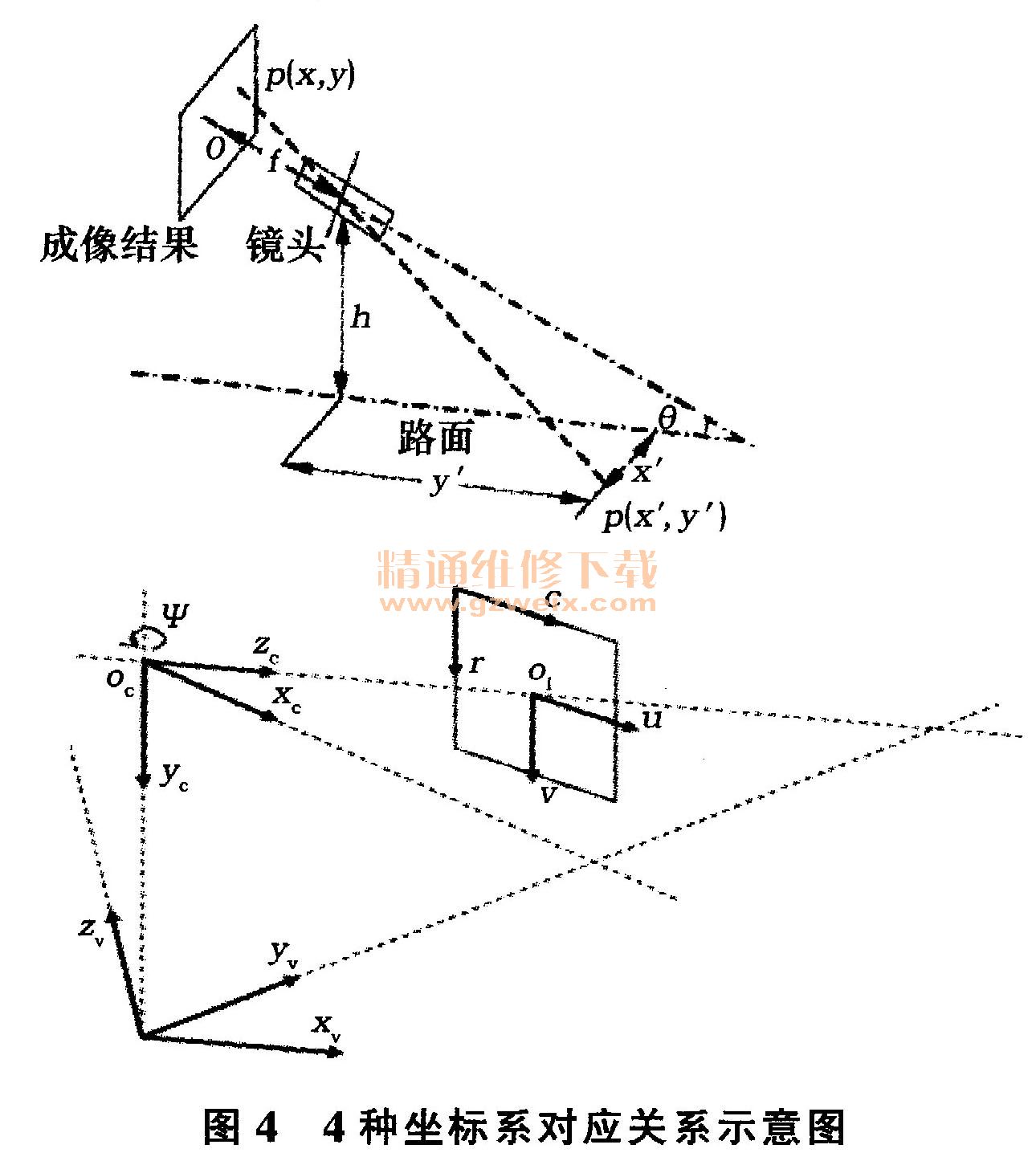
3.1参考坐标系介绍
对车前道路信息的采集,是通过摄像头的逆透视投影原理,将地面上三维车道线投影到二维图像平面上。一般从实际场景到数据图像的成像变换分成以下步骤:世界坐标系→摄像机坐标系→图像平面坐标系→帧存坐标系。
为描述摄像头或空间其它物体的位置,需要在实际场景空间选择一坐标系,这一坐标系称为世界坐标系。而摄像机坐标系是指选择摄像头安装点O为原点,以摄像头光轴为Z轴定义的三维空间直角坐标系。由于这两个坐标系都能反映客观世界的物体位置,实际场景中的任一点通过坐标变换可以在这两个坐标系间相互转换。
客观世界的三维场景通过光学镜头投射到CMOS光敏元件矩阵表面,形成二维图像。这个CMOS光敏矩阵构成的二维平面称为图像平面。假设三维场景中的某一点在摄像机坐标系的坐标为(xc,yc,zc),投影到图像平面后得到p (x,y)点,由于焦距f远远小于实际距离zc,根据小孔成像模型,两坐标系的坐标值关系符合下列公式:x=fxc/zc =,y=fyc/zc。
采集到的每帧图像信息经过A/D转换成数字信号形式,在存储器中以二维数组形式存储,数组中每个元素(像素)的值反映图像点的亮度(或称灰度,彩色图像的像素点亮度用各颜色分量的亮度表示),该二维数据组称为帧存坐标。数组中像素和图像坐标系中的像素点存在一一对应关系。图像处理程序根据目标点在存储器中的位置(即帧存坐标系中的坐标值),可以求得图像坐标中对应像素的坐标。由于图像平面的像素具有确定的物理单位,通过帧存坐标和图像坐标系坐标的转换,系统就可以通过对数组中感兴趣的灰度值目标点分析,确定在图像坐标系的物理值,再通过逆向小孔成像的规则,达到对实际场景车道线的识别和跟踪等工作。这4种坐标系之间的关系如图4所示。
3.2图像预处理
在车辆运行过程中,图像传感器可能出现振动或松动;道路环境的光照、阴影、模糊等原因会造成图像模糊、晃动;图像在传输和转换中也会受到各种干扰等,都可能造成图像品质下降,需要去除道路原始图像中的噪声,增强有用信息的可检测性,降低后续图像处理算法的复杂性,这一过程称为图像预处理。主要技术包括:道路图像的灰度化、图像的平滑处理、边缘增强和图像的二值化等。
1)图像的灰度化彩色图像包含的信息量大,处理速度较慢,根据车道线和环境灰度差别大的特征,一般采用基于灰度特征的识别方法达到车道线检测的实时性要求。对A/D转换得到YCrCb彩色图像格式,需要采用Vgray=0.30R +0.59G +0. 11B对各像素点进行灰度化处理(其中RG、B为像素点包含的红、绿、蓝3种基色量,Vgray为对应的灰度值),生成8位0255的灰度图像二维灰度数组。
2)平滑处理目的是去除图像噪声,本设计采用能够在去除噪声的同时又能保护边缘不变模糊的中值滤波方法,方法为采用3×3方形中值滤波模板,类似卷积的方式对邻域中像素的灰度级大小进行排序,然后选取其中间值作为该点的灰度值,即中心点像素的灰度值为:G(x,y)=MEDIA[G (x,y)]。
3)边缘增强边缘增强的目的在于突出车道线的边缘信息,减少车道线的识别难度。边缘增强方法很多,本设计基于车道线与路面具有明显的灰度差别,选用计算量少、边缘方向检测误差小、实时性高的SOBEL算子对边缘进行检测。以(x,y)像素点为中心的3×3领域内采用SOBEL算子做水平和垂直的梯度运算,利用灰度函数f(x,y)在x/y方向上的变化率可以找到图像梯度的局部最大值,找出边缘点。
对于数字化的离散函数,采用以下近似值公式求出x/y行方向上的梯度S.9凡和该目标点的梯度S:
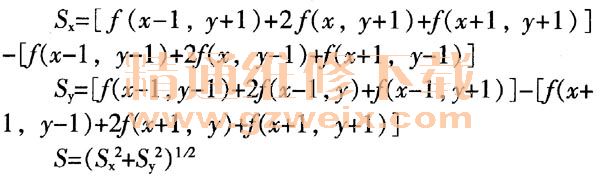
选取适当的阀值T,如果计算出某点的S>T,则认为该点为灰度发生阶跃的边缘点。以此获得图像中的有用边界,并进行增强,获得高品质的边沿图像。
4)二值化为进一步减少无用信息的干扰,需要对经过SOBEL算子处理后的道路图像进行阀值分割处理,即二值化处理。本设计通过全域像素的灰度统计,选取合适的灰度分割阀值。当像素点灰度大于阀值,将该像素点灰度值置为255,否则置0;将边缘增强图像转化成二值黑白图像。
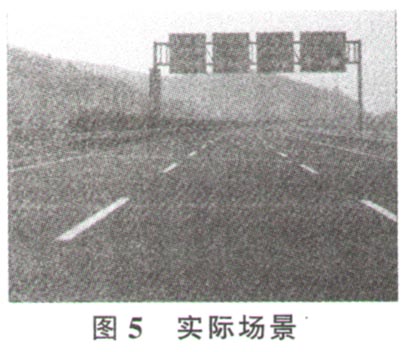
经过以上预处理技术,实际场景的车道线特征被找出,干扰信号被去除,预处理前后的车道线图像对比如图5、图6所示。

")
")
")
")

