・上一文章:大众途安车喇叭长鸣
・下一文章:柴油重型载货汽车京V电控及后处理技术
3.4汽车偏离车道线的报警策略
基于获得的图像坐标系中车道线直线方程以及摄像头安装高度和俯仰角等参数,利用图像坐标系和摄像机坐标系之间坐标对应关系,通过图7中几个相似三角形原理变换,可以计算出实际坐标系中的车辆偏转角β(前进方向和车道线的夹角)和对车道线的距离为d(图7中O点为摄像头安装点,Q点为摄像头在地平面投影点,FG直线为车道线,h为摄像头安装高度,θ为俯仰角)。

常见车道偏离预警系统的报警策略分为距离报警和时间报警2种形式,本设计选择距离限值报警。根据ISO 17361-2007相关要求,当满足以下报警条件且没有抑制请求时发出车道偏离报警:①报警临界线:距车道内侧边界10 cm;②最早报警线:距车道内侧边界70 cm;③最迟报警线:距车道外侧边界30 cm。报警功能示意见图8。
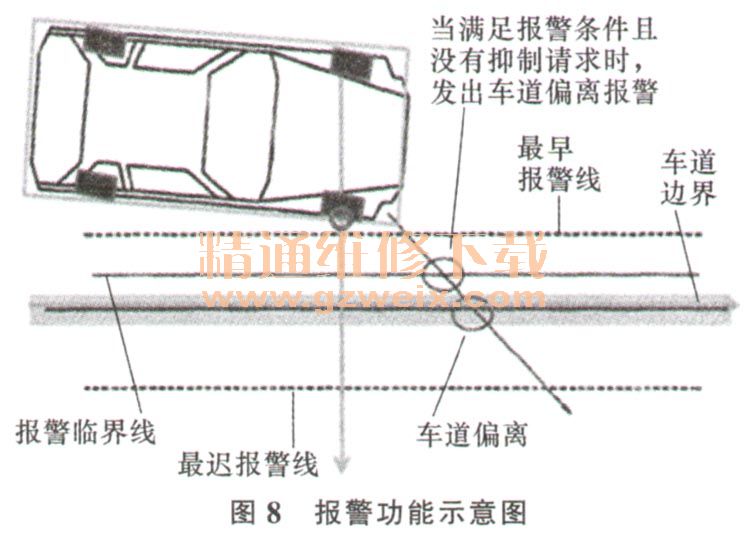
报警距离限值的设置既要保证留给驾驶员一定的应急处理时间,又要避免过度敏感的频繁预警对驾驶员带来的不舒服,结合样车路试测评结果,设定虚拟边界在车道线内侧10 cm。
根据车体实际结构分析,为简化运算,以摄像头安装点对应的车身两侧外边界近似替代前车轮胎外侧。设车身宽度为w,按照以上报警策略,当控制系统计算出d-W/2值小于10 cm时,认为车轮压到虚拟边界,如果这时车速在设定值(本设计设置为65 km/h)以上,驾驶员未打转向灯且无其它抑制条件,系统通过总线发出预警信息,通知仪表进行声光报警。
4 摄像头安装和系统标定
摄像头一般安装在摄像头支架上,支架通常固定在驾驶室内后视镜背部或粘接在挡风玻璃内侧上,鉴于本设计摄像头和控制器分离结构,摄像头质量较轻,为避免或减少振动、松动引起的摄像头中心点偏移,采用胶粘安装形式。
支架设计集成了杂光保护罩,摄像头视野中,镜头到挡风玻璃的几何空间被保护罩包围,避免杂散光干扰视频效果。设计保护罩内表面为黑色,低反射率,有效降低杂光的负面影响。
摄像头安装位置选择在前挡风玻璃中轴线下方,为保证一定的前视距离,摄像头应该尽可能安装位置高一些,但取景窗必须位于刮刷区域内,考虑到不同车辆的差异,应比理论刮刷上边界至少低30 mm。
镜头和支架的安装配合,需要考虑挡风玻璃的几何特征(入射角、厚度、曲率、折射率等),俯仰角的确定需要通过对摄像头的实车标定确定。
标定的作用是通过实景三维坐标系中物体位置信息和图像坐标的像素点的对应关系,确定摄像机成像模型的参数。由于车载应用的摄像头一般选择固定光圈和固定焦距镜头,本系统的标定工作主要是确定摄像头外部参数(安装高度和俯仰角等)。标定需要采用专用的标定软件和专用标定板,标定软件运行需要的硬件环境包括视频采集卡、PC机。标定通过PC机的人机界面,按以下流程进行操作。
1)准确输入测量参数(车宽、高度、摄像机深度、偏移)。
2)标定板放置在距离摄像头3m左右,保证距车轮外侧延长线左右等距。
3)调节标定板高度使其中心与摄像头镜头中心等高。
4)调节摄像头角度使系统中的测试框跟标定板上的图形对应,开始标定。
消失线通过标定板中心且检测到图像中的标志框和标定板2、4排的黑色方格吻合(图9),表示标定正确完成,根据该标定得到的摄像头外部参数(安装高度和俯仰角等),确定摄像头和安装支架的配合结构。
由于存在安装公差和摄像头内部公差,为确保系统正确工作,在整车装配后仍需要通过标定工作来进行适当调整,需要利用标定软件进行微调。

5 道路试验
依照基于ISO 17361-2007编制的产品道路试验测试规范,安装该系统的PD2014款依维柯车,选择不同天气条件和路况进行了为期3个月的道路验证,部分路试照片见图10。
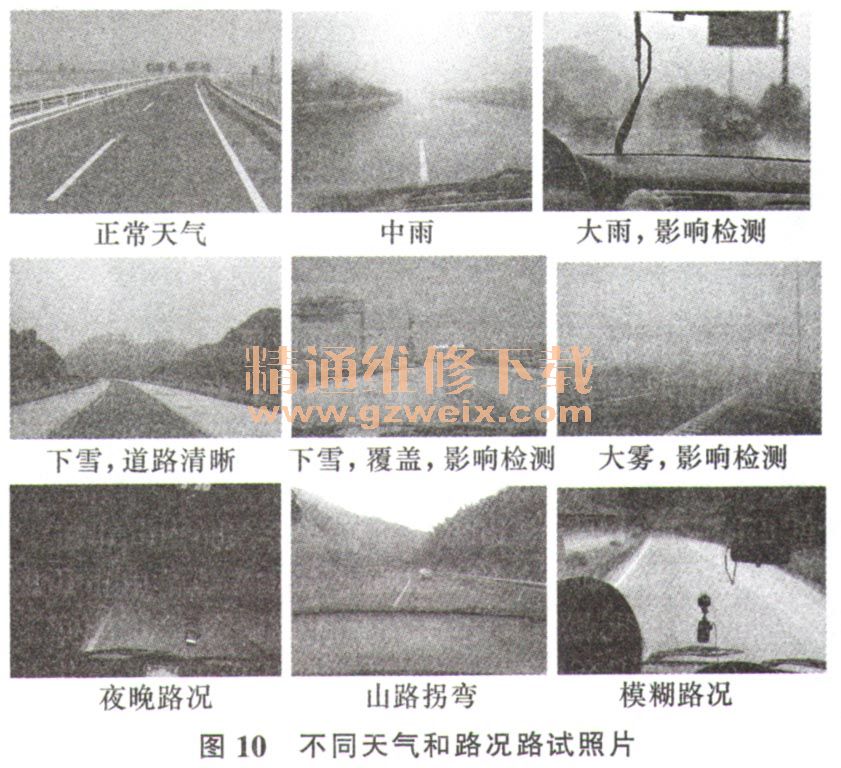
实际路试结果:在车道线掉色或缺失、道路路面积水、太阳位于地平线的正前方时,道路识别可能失败,大雾和雨雪气候无法准确识别,但在正常环境条件下结构化道路的准确报警率达到95%,百公里虚警率2次左右。试验结论为:尽管系统不能100%解决实际问题是采用光学图像传感技术的车道偏离预警系统的主要弱点,但由于成本优势明显,作为辅助类安全技术仍体现出良好的实际使用价值。
6 结论与改进
车道偏离预警系统在国外一些地区已成为法规要求装配产品,预测国内该技术的应用也会越来越普遍,单目机器视觉的车道偏离预警系统具备成本优势,能够适应大多数路况和环境条件,具备良好的应用推广前景。
但应该承认,该技术的研究尚有很大的提高空间,以本设计为例,作者认为在目前技术基础上,该产品的下一步研究方向有以下几方面。
1)进一步对检测算法加以改进,使得检测算法更适应雨、雪、雾等复杂天气环境和不良路况,提高环境适应性。
2)集成前车防碰撞功能(FCW ),通过同一传感器对车前道路的场景采集,增加对前车阴影、轮廓、纹理进行识别,对前车防撞进行预警的功能;丰富产品的功能,进一步提高产品性价比。
3)利用高速运行处理芯片,在仪表硬件线路中整合LDWS+FCW的控制电路,减少控制器数量和连接线路,提高系统集成度和可靠性。
")
")
")
")

