・上一文章:整车静态电流设计及验证
・下一文章:汽车防追尾和防侧撞安全系统设计
摘要:刮水洗涤控制功能对于安全驾驶非常重要,传统通过硬线开关控制的刮水系统功能单一,造成驾驶员需要根据雨量的实时变化频繁切换刮水器各种运行模式。因此需要通过控制器实现更加智能化的控制功能。本文将该控制功能集成到BCM(车身控制模块)中,详细介绍如何结合BCM获取到的车辆运行信息来实现智能化的刮水控制功能。
1 刮水洗涤控制系统简介
汽车刮水的主要功能为刮除挡风玻璃上的水渍和污垢,以提供驾驶者清晰的视野。刮水系统是车身控制必须具备的功能,随着汽车产业的发展,安装在汽车上的BCM控制器功能越来越强大,因此,为降低整车成本一般会将刮水洗涤控制功能放在BCM中实现。
为方便驾驶员控制刮水器,减少行驶过程中根据雨量变化手动操作刮水器的次数,这就要求BCM集成的刮水控制系统可以实现更加复杂的控制逻辑功能,可以结合车辆运行的状态自动切换不同的刮水速度档位(比如结合车速、或者雨量传感器信号等)。
传统刮水洗涤控制系统如图1所示,由开关和刮水执行器组成。

这种控制方式功能只有简单的低速、高速功能,刮水自动回位通过刮水电机内部的复位器通过硬件实现。这种传统的刮水控制系统的缺点是功能单一,需要驾驶员根据实际雨量状态等手动切换刮水状态,舒适性不强。
为低成本解决这个问题,可以将刮水控制功能集成到车身控制模块BCM中,由BCM实现刮水的高速、低速等功能的控制。BCM可以根据整车采集的信号实现对刮水及洗涤系统进行智能控制,提供不同的功能逻辑,以达到提高刮水洗涤系统舒适性的效果。
2 刮水洗涤控制系统的分析
2.1 系统组成
整个刮水控制系统由3部分组成:刮水开关、BCM控制器和刮水执行器。如图2所示。
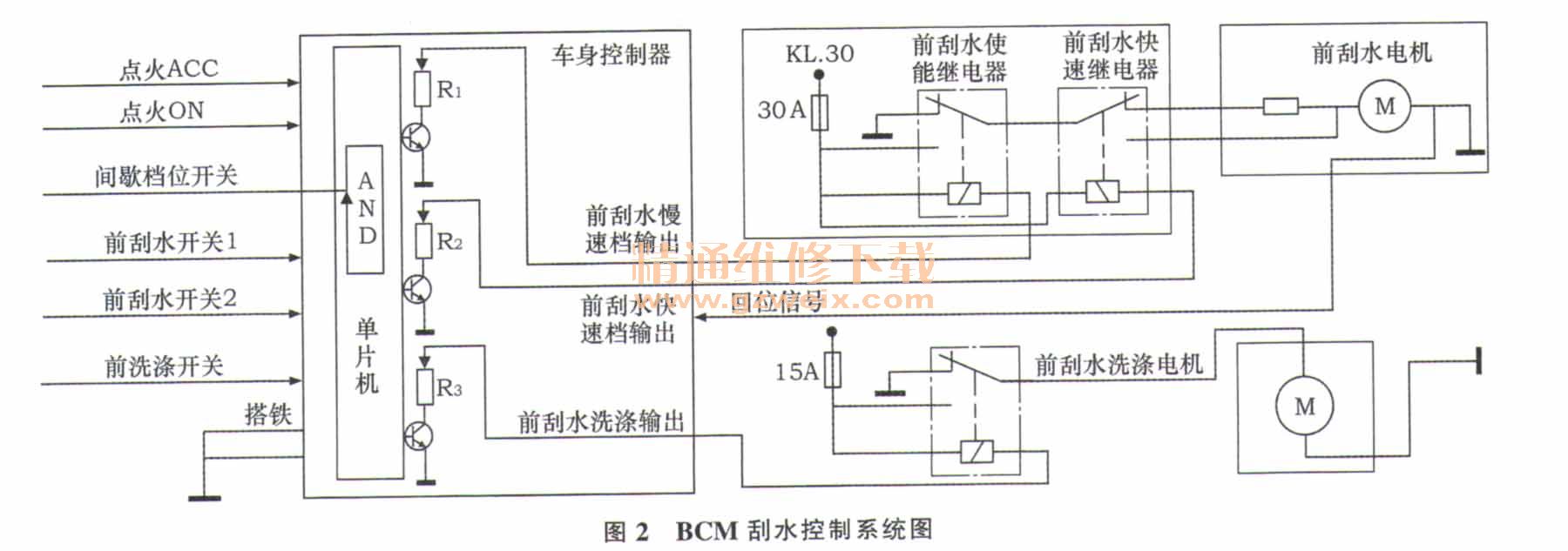
刮水开关档位定义见表1。除了刮水控制开关外还有一个AD(模拟量)开关类型用作间歇档刮水调速功能,通过不同电阻阻值分为4~6个档位,用作客户间歇延时长短的控制。

BCM作为刮水逻辑控制器,通过采集到的开关状态使刮水器工作在不同模式。
执行器主要就是刮水电机,通过BCM给过来的控制信号会执行在不同的速度模式下,或者停止运行。刮水电机会将回位Park(停止位)信号回馈给BCM,这样BCM可以通过Park回馈信号判断刮水器的当前状态。
2.2 控制功能分析
由于BCM可以获取车辆很多运行状态,这样可以结合车辆不同的信息用于辅助刮水器的控制,丰富控制逻辑,提高刮水功能的舒适性。
1)慢速刮水模式
开关模式在慢速模式下,BCM输出前刮水使能信号,使前刮水电机运行于慢速模式下。在前刮水电机运行在慢速模式的情况下切换刮水开关到OFF模式后,BCM会继续输出使能信号,直到收到刮水电机给出的有效Park事件信号后停止输出,使得刮片停止在停止位上,保证刮片不会停在前挡风玻璃中间影响驾驶员视线。
2)快速刮水模式
开关模式在快速模式下,BCM同时输出前刮水使能和快速信号,使前刮水器工作在快速模式下。在前刮水电机运行在快速模式的情况下切换刮水开关到OFF模式后,BCM会继续只出使能信号使刮水电机以慢速继续运行,直到刮水电机给出有效Park事件信号后停止输出,使得刮片停止在停止位上,保证刮片不会停在前挡风玻璃中间影响驾驶员视线。
")
")
")
")

