・上一文章:BCM集成刮水洗涤控制系统关键技术分析
・下一文章:某车型调光开关设计改进
摘要:汽车追尾和侧撞是交通事故的主要表现形式,本文从汽车主动安全技术角度出发,设计了汽车防追尾和防侧撞安全系统。在汽车行驶过程中遇到追尾和侧撞危险时,根据驾驶员有无避让动作,启动自动防御系统。
随着人们生活水平的提高,汽车普及率也越来越高,与之相应,交通事故也越来越多。《2014年国民经济和社会发展统计公报》指出,2014年汽车交通事故死亡人数相对2013年增长率为8.5%,相比2012年增长率为13.46%,相比2011年的增长率为15.78%。可见,近些年来,我国交通事故死亡人数呈逐年小幅度上升趋势。
对大量交通事故的分析表明,80%以上的车祸是由于驾驶员反应不及时引起的,车辆相撞事故中属于追尾相撞的超过65%,其余则属于侧面相撞和正面相撞。所以设计一种实时、可靠、适应性好的车辆防碰撞系统是为提高车辆行驶安全而采用的非常重要的技术措施。
1 防碰撞安全系统设计
1.1原理设计
车辆防碰撞系统在汽车有追尾碰撞和侧面碰撞危险时,能立刻发出报警信号,警示驾驶员及时采取处理措施,并在驾驶员无避险操作的时候自动启动制动系统,避免发生交通事故。系统原理见图1。

整个系统由传感器单元、中央处理单元以及信息输出单元构成。传感器单元收集车辆的内外环境信息,包含车辆上的各种传感器;中央处理单元用于评估车辆行驶的安全状态,由信息采集单元与主控制单元组成;信息输出子系统为驾驶员提供汽车行驶的安全状态信息,由声光报警模块与显示模块组成。
汽车防撞安全系统的工作原理:利用安装在汽车前保险杠上和两侧的雷达传感器实时测量自车与前方目标物间及自车与两侧面目标物的距离和相对速度等信息,传送至信息采集单元;利用霍尔传感器获得的车速信号,输出至信息采集单元进行车速计算;制动、油门位置及路面附着系数也输入至信息采集单元;各种传感器信息经信息采集单元处理后,传送至主控制单元;主控制单元实时判断行车安全状态,发出相应的报警信号,警示驾驶员采取措施或系统自动采取措施。
汽车追尾时,系统采用两次报警的方式,如果实际测量间距小于危险报警距离,为危险报警状态,红灯闪烁,产生短间隔报警音,要求驾驶员紧急制动或自动制动;如果实际测量间距大于提醒报警距离,为安全行车状况,绿灯亮、无报警音;如果实际测量间距小于提醒报警距离而大于危险报警距离,为提醒报警状态,黄灯闪烁,产生长间隔报警音,提醒驾驶员需要松开油门踏板。汽车侧撞时,系统采用一次报警方式。
1.2制动距离的计算
为了保证绝对安全,自车制动停止后,两车之间应保持一定的安全间距do。do越大,系统的虚警率越高;越小,系统的安全保障能力越小。do的取值因驾驶员的驾驶风格而异,国内外的资料一般选取为2~5 m,为了保证系统的安全性,本系统取最大值5 m。
1)危险报警距离计算公式
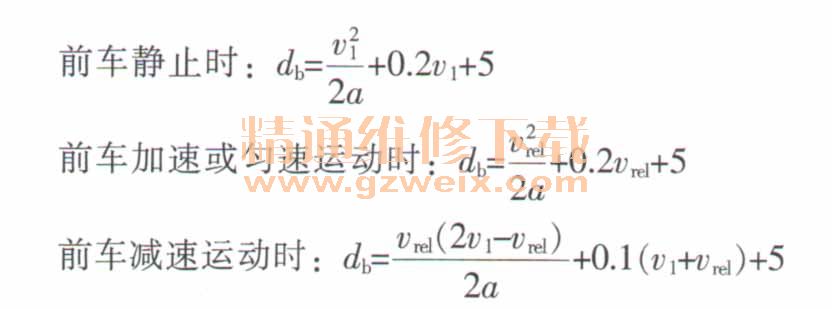
2)提醒报警距离dw计算公式
前车加速或匀速运动时:dw=db+vre1
前车静止或减速运动时:dw=db+v1
上述公式中:v1-----自车速度;。V2-----前车或侧车速度;vre1-----相对速度;a-----本车加速度。
1.3 相对距离和相对速度的测量
车前及两侧采用毫米波雷达来作为测量传感器。毫米波雷达的工作频率在30~300 GHz,波长短,频率高,抗干扰性强,测距性能稳定,受对象表面和颜色的影响小,可以全天候工作,不受天气状况的影响,环境适应性能好,能精确地测量目标的距离和相对速度,并且雷达的外形尺寸很小,便于在汽车上安装。毫米波雷达有调频连续波(FMCW)和脉冲雷达两种,汽车毫米波雷达系统一般采用结构简单、成本较低、适合作近距离探测的调频连续波雷达方式。
2 自动制动系统的设计
当实际测量间距小于危险报警距离,且信息采集单元没有检测到驾驶员的减速或制动信号时,主控单元自动启动制动系统。制动系统由制动伺服电机、齿轮齿条传动机构、液压缸等组成。主控单元输出的开关量,负责接通制动伺服电机,扭矩传感器将获得的扭矩大小转换成电压数字量,传送给伺服电机。伺服电机的角位移经齿轮齿条传动机构变成制动液压缸的位移,进而得到相应的制动力矩,完成自动制动任务,自动制动原理见图2。
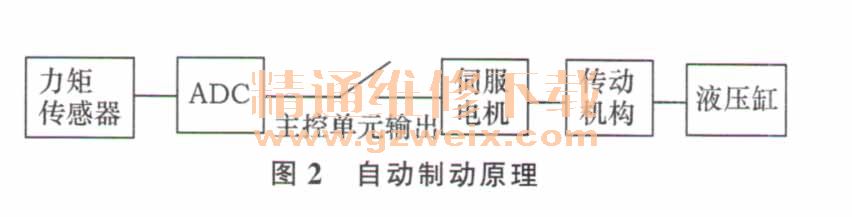
在车辆不同的负载和车速条件下,力矩传感器输出的电压大小也不一样,伺服电机的角位移随之变化,液压缸产生的压力大小就会不同,制动器就能得到所需对应的制动力矩,实现最佳的制动效果。
")
")
")
")

