(2) CAN-C2网线电压
CAN-C1(+)和CAN-C1(-)对地电压与传统CAN网络电压类型,测量诊断接口12号和13号端子对地电压,可以判断CAN-C2网络状态,网线电压实测值如图13所示。
 3. CAN-BH
3. CAN-BH
CAN-BH网络(图14)是中速网络,满足乘员舱舒适性控制单元间的通讯需求,CAN-BH网络上连接的控制单元包括IPC、RRM(无线电接收模块)、CSWM(舒适座椅模块一座椅及转向盘加热模块)、LBSS(左侧盲点监测模块)、RBSS(右侧盲点监测模块)、AMP、TTM(拖车模块一拖车钩模块)、HVAC、ETM及
BCM、CAN-BH网络连接到多功能诊断接口(DLC)。

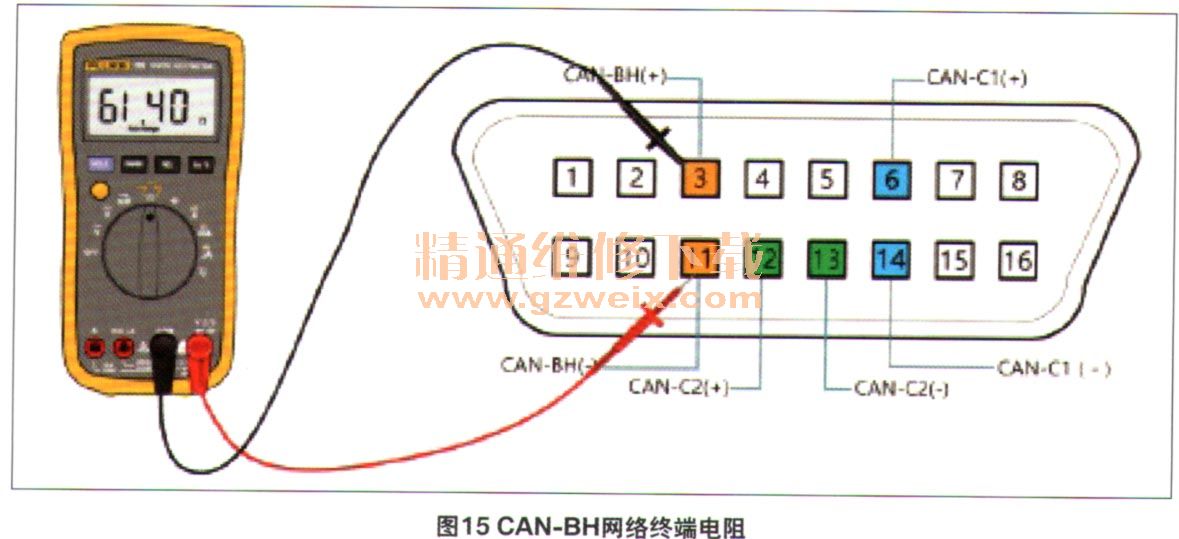
(1) CAN-BH终端电阻
CAN-B日网络120Ω终端电阻在
BCM及PC控制单元内,断开
蓄电池测量诊断接口测量3号和11号端子的电阻值为61.40(图15)。
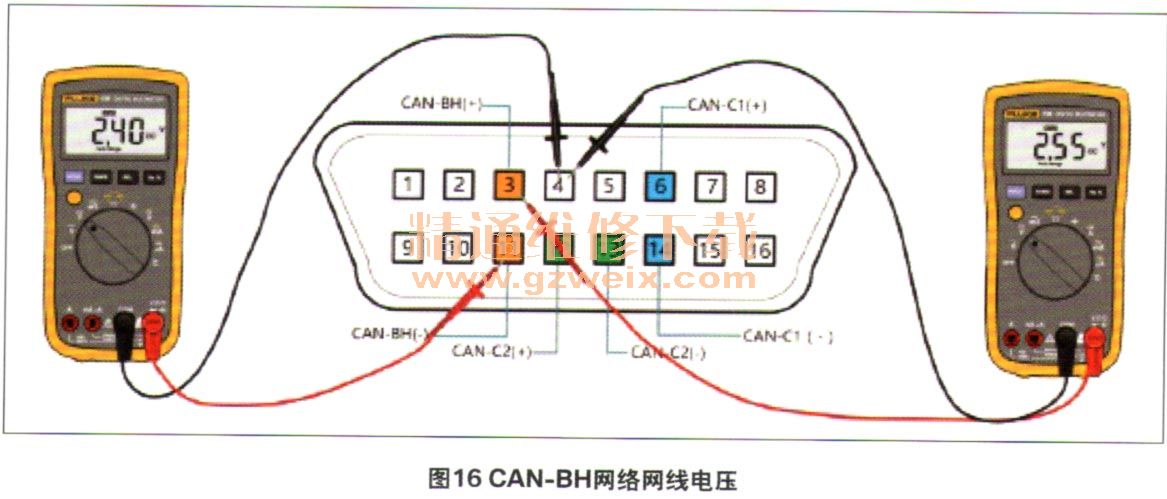
(2) CAN-BH网线电压
CAN-C1(+)和CAN-C1(-)对地电压与传统CAN网络电压类型,测量诊断接口3号和11号端子对地电压(图16),可以判断CAN-C2网络状态。
 4.多功能诊断接口DLC
4.多功能诊断接口DLC
在DLC上连接有3个网络,3个网络连接的端子如图17所示。
 5.网络休眠及唤醒
5.网络休眠及唤醒
当钥匙关闭后,CAN-C1、CAN-C2及CAN-BH网络会在约10~12 s后进入休眠模式。如果钥匙处在关闭位置,当任何一个车门打开,网络就会被唤醒,其波形示意图如图18所示。

ACC控制单元与HALF控制单元通过专用CAN-C网络连接,在这2个控制单元之间使用专用网络的原因是为了在巡航工作期间及FCW功能打开,能在这2个控制单元之间连续传输数据。
6.Lin网络(图19)

有些控制单元与车辆部件的通讯通过Lin网络,
BCM通过4个Lin网络与以下部件通讯。
(1)Lint
Lint连接
BCM与IBS(智能
蓄电池传感器)、UAM(超声波放倾斜模块)、ASU及RLS控制单元。
(2) Lin2
Lin2连接
BCM与SWS、ASBM(辅助开关组模块)、TSBM(地形选择开关模块)及RVACM(后摄像头模块)。
(3) Lin3
Lin3连接着
BCM与WSMP(乘客车窗智能电机)及WSMD(驾驶员车窗智能电机)
(4) Lin4
Lin4连接
BCM与CSWC(巡航控制转向盘指令控制单元)。
(5)仪表IPC通过Lin网络与ECSB(紧急呼叫开关)、COM(指南针模块)及HUM(湿度传感器控制单元)通讯。
(6)在ECM与智能发电机电压调节器之间也有一个Lin网络连接。
上一页 [1] [2] [3] [4] [5] 下一页
")
")
")
")

