二、控制原理
1.速比控制
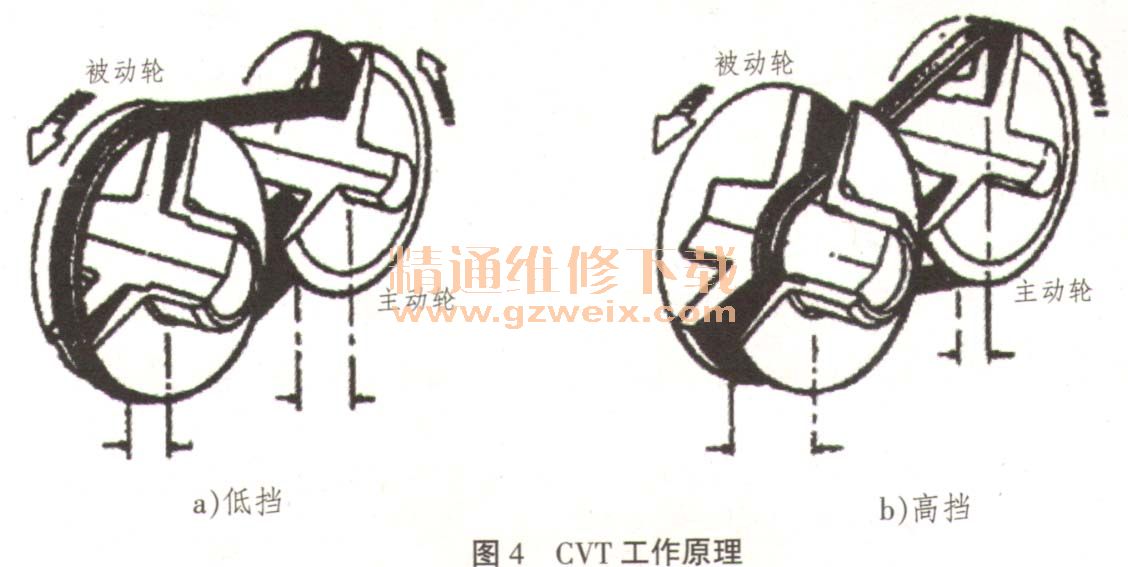
图4所示为
CVT的工作原理。其中主动带轮、被动带轮及V型带组成变速部分。而组合成一体的2个带有斜面的半带轮形成一个带轮。由油缸控制其中一个半轮轴向移动,另一个半轮固定在轴上,根据控制机构可以改变半轮间的轴向位置。传动带的周长以及2带轮轴间距都固定,从而得到传动比:

式中:
r1----主动带轮工作半径;
r2----被动带轮工作半径;
n1----主动带轮转速;
n2----被动带轮转速。
在测试期间,按照发动机的实际工况,能够比较准确的获得其理想速比。主动带轮的转速和被动带轮的转速可以通过转速传感器测定,实际工作速比由控制系统根据理想速比进行控制,以使发动机在理想工况下工作。
2.夹紧力控制
当改变
CVT的速比时,相应变化的是被动轮的夹紧力,避免V型带打滑或降低传动效率门。因而需要对被动轮油缸压力进行控制,通过参考文献,可以获得此压力的计算公式:

式中:
Te----输入转矩;
β----传递转矩的贮备系数;
α----带轮锥形角;
ADN----被动轮油缸有效面积;
μ----摩擦系数;
RDR----主动带轮工作半径。
在测试期间,通过查询相关的参数,即可解出。
3,起步离合器控制
驾驶员的意图可以通过起步离合器的工作状态来体现。倒车离合器与前进离合器的分离与接合是通过脉宽调制电磁阀的控制来实现的。电磁铁电信号占空比随着控制阀的输入输出压力的变化而变化。若占空比为零,则无压力输出;相反,若占空比为100%,则输出最大压力。而占空比的变化范围在0~100%区间时,通过不同的控制压力控制离合器的分离与接合时间。
上一页 [1] [2] [3] 下一页
")
")
")
")

