・上一文章:基于TMS320C6713的人脸识别系统设计
・下一文章:微小型无人机全姿态增稳控制系统的设计与实现
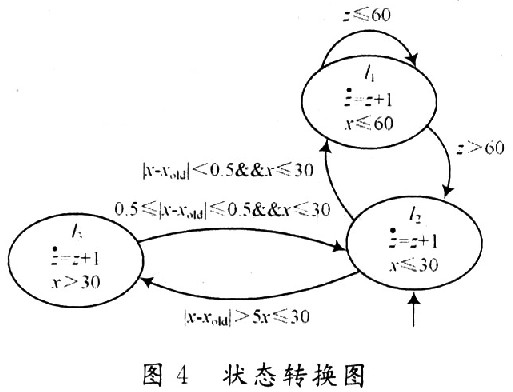
在状态l3下。节点各部分都处于活动状态,每间隔1 s发送一次数据,用于倾斜角度变化过快或角度达到了高危值。节点开始于状态l2,一般情况下,当倾斜角不发生变化或变化值低于O.5°,系统在状态l1和l2之间转换,即数据在每间隔60 s发送一次,间隔期内,节点处于睡眠模式,以节省能耗。如果变化值超过O.5°,系统进入状态l2,否则,当变化值超过5°,就进入状态l3。使用该算法,在倾斜角变化正常的情况下,设无线传感器节点直接和sink节点通信,则节点大部分的时间处于状态l1。
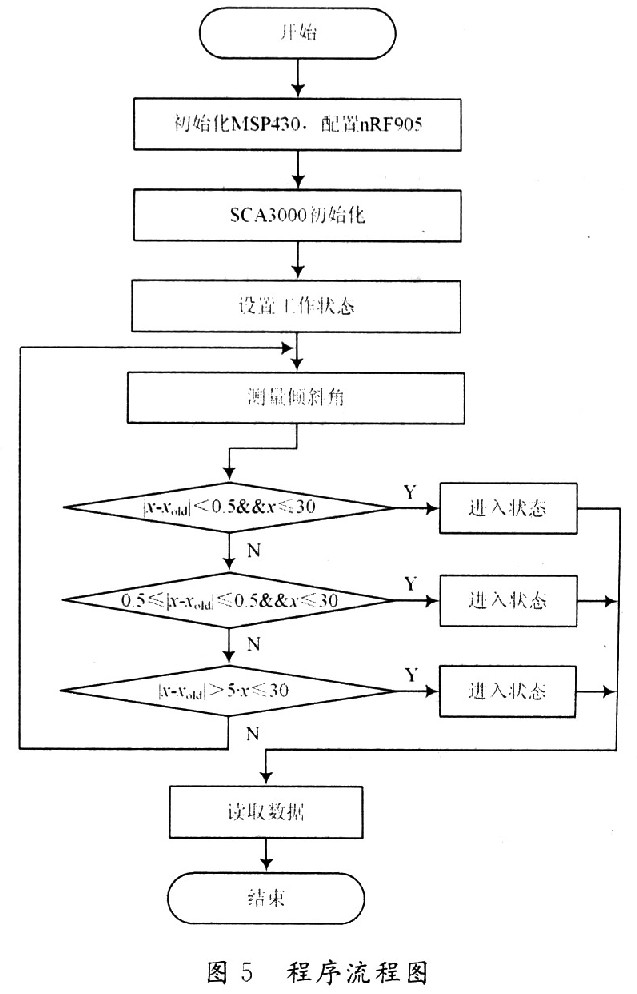
图5为混合自动控制算法在MSP430和nRF905无线加速度传感器系统中实现的简化流程图。
5 结语
由于传感器节点各部分存在着多种工作模式并且能量消耗差异较大,所以通过动态功率管理方法可以在系统级有效地降低节点的功耗,这里在介绍无线传感器动态功率管理基本原理的基础上,对几种典型的动态功率管理方法进行了分析研究,发现在环境参数(如加速度、温度等)变化稳定的情况下,通过混合自动控制算法对环境变量的变化值范围划分来设定系统的工作状态,控制无线收发模块的收发频率,能增加节点的休眠时间,减少收发次数,从而有效地降低系统功耗,最后通过MSP430、nRF905无线加速度传感器系统,介绍了混合自动控制算法的应用。





