理想状态下,传感器节点在完成任务后迅速进入睡眠状态并在下一事件到达时迅速进入活动状态,能最大程度地节省能耗,根据式(1)可得门限时间:

但事实上,节点的状态转换也存在较大的能量消耗和延迟。因此,在进入睡眠状态时,节点应首先在寄存器上保存之前的数据和参数。同时,激活节点仍然需要大量的能耗和额外的时间,低功耗模式下消耗的能量越少,转换到活动模式时带来的延迟就越大,所以,应考虑到状态转换额外的能耗Padd。当且仅当Esave,k>Padd时,系统才有意义,因此,可以得出门限时间:

Tth,k代表传感器节点的门限时间。在节点的非完全关闭状态,事件到达,系统可以自动转入激活的工作状态,对于完全关闭的状态S4,由于节点的大部分元件都处于关闭状态,节点无法检测到事件和收到信息,所以一些事件将会丢失,根据剩余能量,得出S4的门限时间为:

式中:Vstd代表标准工作电压,Vpre代表当前电压。
3 DPM算法 文献中提出了基于概率判别无线传感器网络动态功率管理。此方法对于是否进入完全关闭的状态S4,给出一个概率值,利用概率判别来进行有效的功率状态转换,如果概率值偏大,则进入完全休眠状态的机率增大,能量消耗减少,但事件丢失的可能性增加;否则,使用能量增多,事件丢失的可能性减小。文献提出了一种利用小波和卡尔曼滤波和自回归分析联合预测下一事件发生的时间来决定进入何种功率状态的方法。该方法根据历史事件的到达时间来预测下一事件的发生的时间。在森林火警监视、洪水监测等特殊事件发生概率很小。历史数据无法获得的应用领域。文献提出了一种利用小波和自回归的动态功率管理方法。该方法利用收发器(Sink)节点上的历史
数据流预测未来的值,在后续周期内,若传感器节点的观测值不超过给定阈值则不向Sink节点发送数据,Sink节点将预测值作为观测结果,通过减少传感器节点工作时间,降低网络数据传输量来减少传感器网络的总体能量消耗。由于无线通信占整个无线传感器网络能耗的主要部分,所以在不影响系统性能的前提下,有效地对无线收发系统进行管理可以高效地降低系统能耗。混合自动控制(Hybrid Automata)是根据传感器检测信息的变化情况来控制传感器节点收发的频率,通过增加休眠时间、降低收发次数对无线传感器节点进行动态功率管理,从而降低系统功耗。
4 混合自动控制
4.1 混合自动控制原理 在混合自动控制条件下,系统分为几个离散的状态,每个状态都有一定的保持条件、相应的控制变量、初始值和向其他状态转换的临界值。当环境变量改变或保持不变时,通过对形势加以分析(反馈)来执行在不同状态模式之间的转换。图3为混合自动控制示意图。
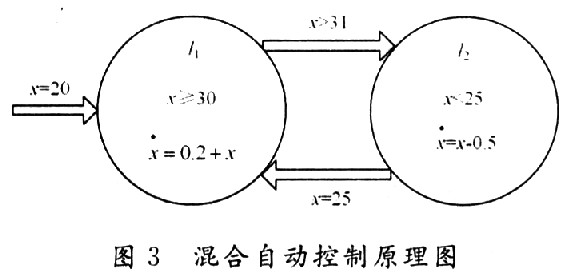
假如系统存在两种状态l1和l2,一个动态变量x,系统开始的状态为l1,x的初始值为20,在状态l1下,变量x随着等式 不断增大,当x的值等于30时,就达到了临界条件,
不断增大,当x的值等于30时,就达到了临界条件, 时,迅速地进入状态l2。在状态l2,x随等式x=x-0.5递减,临界条件是x=25,当x<25发生状态转换进入状态l1。在实际运用中,此示意图可以理解为倾斜角度控制在25°~31°之间。
时,迅速地进入状态l2。在状态l2,x随等式x=x-0.5递减,临界条件是x=25,当x<25发生状态转换进入状态l1。在实际运用中,此示意图可以理解为倾斜角度控制在25°~31°之间。
4.2 混合自动控制算法在无线传感器节点上的实现
由于对运动中物体的倾角测量在交通、航天、军事等领域有着重要的意义,这里采用加速度传感器对倾斜角进行测量,介绍混合自动控制算法的应用。基本思路:无线传感器节点根据环境变量的连续性变化,对传感器执行离散的处理应用,当环境参数改变(增加或减小)时,传感器的状态变量相应改变,当改变到临界点时,系统状态转换为另一功率状态。首先对系统作如下要求:变量x表示所测量的倾斜角度值,最高为30°,最低为8°,它代表环境参数的改变,是各状态之间转换的主要因素;变量z为计时器,用于状态的计时。为了简化控制过程,把系统分为三个状态,l1为睡眠状态,此时传感器模块和无线收发器都处于不活动状态,控制系统保持l1状态为60 s。其不等式条件为z≤ 60,当z>60时,转入状态l2。状态l2和l3表示不同的采集和无线传输频率的活动状态,状态l2下的采集和无线传输频率低于l3,此时每间隔10 s发送一次采集的倾斜角度数据,在发送完之后,无线收发器和传感器进入关闭状态等待下一个周期的到来。运行过程中,当倾斜角的变化在O.5°~5°之间(O.5≤|x-xold|≤5)且倾斜角度不超过30°(x≤30°)时,系统运行在状态l2;当倾斜角度变化大于5°(|x-xold|>5)或x>30°时,系统进入状态l3运行;当倾斜角度变化小于0.5°(|x-xold|<0.5)且x≤30°时,节点处于睡眠状态l1。状态转换图如图4所示。
上一页 [1] [2] [3]





