・上一文章:基于MiniGUI 的GPS自动定位系统设计
・下一文章:液晶驱动MAX7232BF介绍及与单片机的硬件连接
令时标间隔为1.5 ms,开发平台下的HBRS混合定时调度时序如图4所示,其中空白时间段中处理器处于休眠状态。
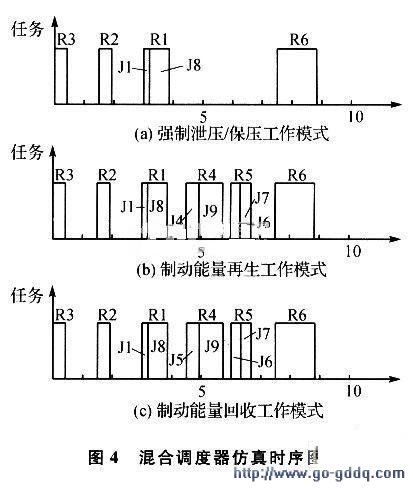
图4(a)说明了当HBRS电子控制系统在强制泄压和保压工作模式时处理器执行任务的时序。此时,处理器根据任务R3和R2采集的车辆工作状态信息,经任务R1判断系统的工作模式,若为强制泄压或保压工作模式则执行任务R6发出控制命令。
图4(b)和图4(c)说明了当HBRS电子控制系统在制动能量再生工作模式和制动能量回收工作模式时处理器执行任务的时序。2个模式的区别在于任务R4 中分别触发的子任务为J4和J5。任务R1判断系统工作于制动能量再生工作模式,触发任务R4查询计算液压泵马达有效排量的驱动电流值并触发任务R5采集车辆的负荷状况对驱动电流值修正,通过任务R6发送HBRs系统各电磁方向阀、电磁离合器和液压泵马达的驱动命令。
结语
本文应用时间触发模式设计了液压式制动能量再生系统的电子控制系统混合调度器,实现了HBRS的基本功能。通过功能模块划分、任务划分和时间序列的设计可以方便地设计时间触发模式调度器。时间触发模式设计的电子控制系统具有安全、成本低和程序简单的特点。





