・上一文章:去除车雾 你会选择哪种方法?
・下一文章:浅谈我国新能源汽车发展路线
3D四轮定位仪是3D数码影像四轮定位仪的简称,采用世界上最先进的四轮定位技术。Y H3D-6002系列动态四轮定位仪(图1),四个目标反光板安装在车辆的四个轮辋之上。滚动车轮,由摄像机对目标反光板上的几何图形进行连续拍摄。通过计算机对几何图形的变化进行分析运算,得出车轮及底盘等的相应定位参数,再由显示屏进行显示。该技术主要采用物理透视学的基本原理与计算机信息处理技术。
一、3D动态四轮定位仪的优势
1.精度更高,功能更强大。其精度可以精准到0.1m m/0.01°;功能除可实现所有传统参数外,并可测出轮偏等距离参数,轻松实现普通定位仪不可完成的许多功能。
2.操作更简便。其测量不受平台水平度影响,即使车身倾斜,精度也不受影响;仅需推动汽车或滚动车轮,即可完成所有参数测量;安装目标板、车辆滚动补偿、虚拟测量、测量速度非常快;没有移动部件,无需维护工作;目标板无需标定;在车轮上无电子部件,如果目标板跌落,不会有电路损坏,装好后可继续工作。
3.故障率极低。目标反光板上无电子元器件无需电池供电及数据传输,仅起图像反光作用;主体支架为金属支架,横梁多为铸体,抗腐抗压性强;电脑为品牌高端配置,以适应超大数据处理,性能更稳定。两个高精度数码相机持续不断的监控每个车轮上的目标板,相机安装在高处,避免损坏。
4.可选择参考平面。实时参考平面:以目标板作为参考平面;固定参考平面:以举升机平面作为参考平面。
5.定位仪目标板具有:抗腐蚀性、防碎的铝合金表面,防撞击的外壳内置缓冲,在车轮上无电子部件,无需维护工作。轻量化设计,无连接电缆、无需标定等特点。
6.便于使用。视野范围宽广;车辆可举升到便于调整的高度;目标板和控制台之间无电缆或电子信号传送。

二、产品组件
图2所示本系统主要由图像采集部分和图处理软件组成。图像采集部分为:两部高分辨率摄像机、高精度实时图像采集器、辅助光源和标靶。左、右侧摄像机分别摄取汽车左右侧标靶图像,并通过图像采集器传输给计算机进行数据处理,标靶通过轮夹与被测车轮固定连接在一起,由标靶上的目标点计算确定车轮的位置关系,从而确定车轮的定位参数。
数据采集部分的组成部件为两部高分辨率摄像机和标靶。左、右侧摄像机分别摄取汽车左右侧标靶图像,并通过图像采集器传输给数据处理部分。
1.摄像机
本系统含有两部高分辨率摄像机(图3),分别对安装在车轮上的四个标靶图像进行捕捉。摄像机固定于两个外壳之内。摄像机在首次安装时进行了精确标定,用户在四轮定位仪的使用过程中无需再对其进行标定。
2.高亮度频闪LED红外光源
每个相机配有一组LED红外光源,用于帮助摄像机捕捉标靶图像,固定在摄像机四周呈环状分布,图4所示。
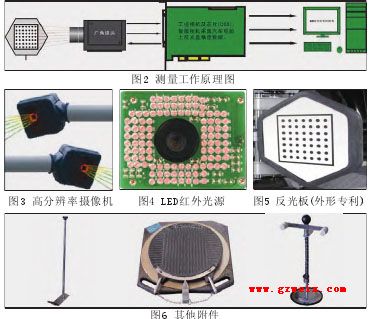
3.反光板(标靶)和轮夹
系统共有四个反光板夹合成体,是整个检测系统的关键部件,为摄像机监测的目标,在反光板背面有安装车轮的标识。在装配轮夹时,需通过调节旋钮将轮爪的间距调整合适,并选
择没有形状损伤或配重铅块的轮辋处作做为安装位置,与汽车轮辋相连。必需保证四个轮的水平小端面与轮辋紧密接触,再锁紧轮夹,并给轮夹装上保险带。
4.其他辅助部件(图6):转角盘、方向盘固定件、刹车板固定架。
")
")
")
")

