・上一文章:检修本田雅阁刹车太过灵敏故障
・下一文章:分析及诊断OBD 车载诊断系统故障(八)
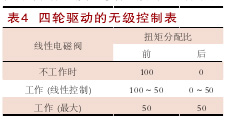
(4)四轮驱动的无级控制(如图 5所示)。
四轮驱动控制 ECU 通过防滑控制 ECU 的输出,得到 4 个车轮的转速信号,根据车辆前、后轮的转速差,通过计算来控制流向线性电磁阀工作电流的大小。当前、后轮的转速差超过四轮驱动 ECU 所规定的转速差后,其ECU 向电磁控制联轴器的线性电磁阀输出线性工作电流。使前、后轮的扭矩传动比发生变化(如表 4 所示)。进而实现四轮驱动控制 ECU 对电磁控制联轴器的无级控制,使车辆在前、后轮驱动力分配上得到最佳控制。
5. 主动转矩控制四轮驱动系统的工作原理
主动转矩控制四轮驱动系统来自各 ECU、开关、转向角传感器、车轮转速传感器和横摆率传感器等信号来检测驾驶条件。系统的工作可分为AUTO 模式和 LOCK 模式。
(1)AUTO 模式(如图 6 所示)。①当车辆从停止状态开始直线行驶时,四轮驱动控制 ECU 接收到系统的检测信号后,经过计算判断车辆需要增加后轮的驱动力,于是向电磁控制联轴器的线性电磁阀输出较大(最大)电流,使电磁控制联轴器开始工作,将发动机传输至前、后轮的全部驱动转矩进行最佳分配,从而确保车辆优越的起步性能。
②当车辆从停止状态开始急加速或直线加速行驶时,四轮驱动控制 ECU接收到系统的检测信号后,经过计算判断车辆需要增加后轮的驱动力,随即向电磁控制联轴器的线性电磁阀输出大(或最大)电流,电磁控制联轴器投入工作,加大后轮的转矩,控制后轮所产生的侧滑量,以确保直线加速期间卓越的加速性能和行驶的稳定性。
③为防止车辆从低速行驶转弯期间,由于前、后轮之间的转速不同而施加制动,车辆容易出现侧滑这一现象。电磁控制联轴器会根据接收到四轮驱动控制 ECU 输出电流的大小,减少分配至后轮的转矩,即使车辆中高速行驶时,该系统通过与防滑控制 ECU 的联网控制下,同样可以确保较高的转向性能,并且稳定性不会受到路面状况的影响,从而确保车辆全程行驶转向时的稳定性。
")
")
")
")

