・上一文章:分析及检修丰田卡罗拉1.6GL双可变气门正时系统(三)
・下一文章:检验及维修汽车制动系统的技术
如图 4 所示,在前方有慢车插入时(见图 4 左),ACC 通过减速作出反应,使本车速度与前车速度相当。若前方车辆加速或者变换行车道,前方无车(见图 4 右),那么 ACC 会使本车重新加速,恢复到预设车速。加速行为取决于当前车速或者当前挡位,在某些车型上,可以在辅助菜单上进行基本设定。

在图 5 所示的交通情况下,尽管行驶车辆的行车道前方无车,但是 ACC 可能会对右侧行车道上行驶的车作出反应(图 5 左)。车道探测的精确度受到车速的影响,车速越高,需要的车距越大,行车道预报的精确度越低。特别是在左转弯时。对 ACC 来说,转弯半径要大于 500 m。并且在紧邻车旁刚刚插入或者不在同一条直线上行驶的道路使用者(如摩托车,图 5右),由于不在 ACC 的视野范围内,因此系统不能对其作出反应。
三、操作过程
以迈腾的操作为例子(见图 6),“ACC OFF”代表“ACC 功能关闭”;“CANCEL”代表“待命模式”,同时在存储器中保存期望车速值。“ACCON”代表 ACC 总是处在“关闭”状态,必须按 ON/OFF 按钮切换到“待命模式”。“RESUME”代表恢复到预定车速,每向后拉一次,车速增加1km/h。


如图 7 所示,若按压“SET”时,激活 ACC,当前车速被存储。控制杆向上推一次,增加 10km/h;向下拉一次,减少 10km/h(与车速有关的逻辑加减法,最大车速 210km/h;最小车速 30km/h)。如果控制杆按压不超过 0.5s,速度增加 10km/h,如果按压不动,每超过 0.5s,速度持续增加 10km/h。其中“Distance”可以分几个阶段调整与前车的距离或者时间间隔。
ACC 激活必须满足控制杆置于D、S 或 Tiptronic 位置,并且车速介于 30~210 km/h 之间,同时 ESP 系统开启。当控制杆放在 S 位置或者手动位置时,ACC 的加速行为更加偏向运动。当置于 D 挡位置,则ACC 的加速行为更加偏向舒适。如果 ESP系统有故障的话,ACC 系统不会启动。如果车速没有达到或者超出了 ACC 启动条件,车辆则会通过仪表通知驾驶员,然后 ACC切换到被动模式。
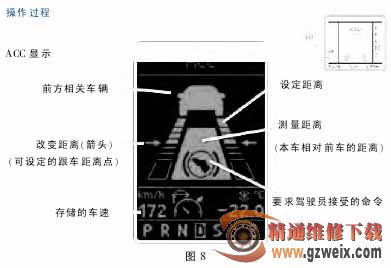
车辆行驶过程中,如果 ACC 探测到相关车辆,车辆图标就会出现在显示器上(如图8)。 两边的条状为与前车的时间间隔(跟车距离)。与前方车辆的时间间隔(跟车距离)被分为 7 级,可以通过设定来更改跟车距离(通过两边的箭头来显示当前设定的跟车距离,设定更改后会在几秒钟之后显示在显示屏上),由驾驶员主动设置的时间间隔点(实车上为红色色块)表示。中部的条标出本车相对前方车辆的位置。中间的灰色块是传感器测量到的本车相对前车的距离,如果测量距离超过了设定距离的下线,则会要求驾驶员踩制动踏板,会有制动图标出现,并伴有声音警告,如果不采取措施的话,会有撞车的危险。
如果在特定的条件下系统检测到有发生碰撞的危险(当 ACC 也处于关闭的情况下),最初将给出声音和闪光报警,同时车辆对驾驶员可能采取的紧急制动做出准备:在车辆没有被减速的情况下,制动片贴近制动盘。如果驾驶员没有对警告做出反映,伴随着一次短暂的、剧烈的车身摇晃(用来使驾驶员关注碰撞的风险),制动系统主动介入。另外警报音或者整个外围监控系统可以在辅助菜单内“前行辅助”选项内关闭。
四、系统校准
装备有 ACC 的车辆在后桥底盘位置变动时,或者系统更换感应器、传感器固定架、前保险杠和汽车前盖时、车辆前部损坏(例如在对撞事故发生后)时,都必须对 ACC 传感器进行校准。

")
")
")
")

