・上一文章:分析及检修丰田卡罗拉1.6GL双可变气门正时系统(三)
・下一文章:检验及维修汽车制动系统的技术
一、系统简介
ACC 传感器装备在车头大众的徽标下,没有装载传感器的车型徽标是镂空的。ACC 是普通巡航控制功能的扩展,ACC 的基本功能是控制车辆,使其与同方向上的前车保持在驾驶员设定的距离。在高速公路上开启 ACC 自适应巡航,设定好跟车距离,系统就可以包办驾车工作了。位于车头 VW 徽标后的雷达随时监视前车的速度,自动控制制动,保持合适的车速(见图 1)。

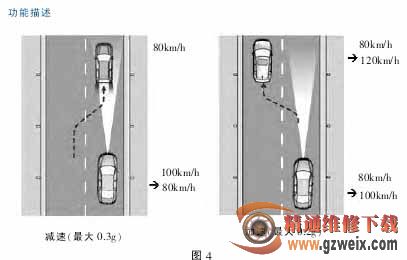
雷达传感器用来决定与前车的距离和相对车速,如果距离大于设定的距离,车辆加速到驾驶员设定车速。如果距离小于设定距离,ACC 系统会自动减小发动机的扭矩,并在必要时采取必要的制动,以此将两车车距调节到驾驶员预设的值,该值为受时间控制的值。出于安全性考虑,制动减速度被限定在 0.3g (大约 3m/s2)。如果这样的减速度不能制动停车,则系统通过仪表发出声音以及文字提示,要求驾驶员介入,实施制动。总之,驾驶员需要对过程负责。ACC系统在一定程度上减轻了驾驶员的劳动强度,间接提高了道路安全性。但是在特定的情况下,驾驶员仍需要主动采取制动措施。根据车型不同,自动制动可能使得车辆停下(跟随前车停下)。
出于防止被盗和发生碰撞时动力总线的稳定性考虑,ACC 控制单元并不是直接连到动力总线,而是可以通过一个断路继电器 J788 关闭(见图 2)。继电器是一个 6 脚继电器,控制号为 479,在 J519 后方,从519 位置只能看到继电器的后面。该继电器由网关通过 T20 插头的 3 脚进行控制,15 电接通后,J533 通过该脚通电,J788 继电器吸合,断电后断开。

这样可以使汽车熄火后,切断此控制单元的动力总线连接,防止汽车被盗;另外,当汽车发生碰撞时,用来切断此处动力总线连接,防止由于此处动力总线因碰撞造成断路/短路后不能着车。
ACC 发射的波为雷达波。雷达波并非超声波,雷达以光速传播。喷涂、积雪、粘贴都会造成信号不准,报故障。因此 CC 大众徽标与普通徽标不同,由塑料制成,表面镀层有铟金属。选择铟作为镀层,是因为铟是一种具有良好的雷达穿透性材料,并且具有银白色光泽和良好的延展性和再塑形特性。装有 ACC 系统的大众徽标和普通徽标不能互换。
ACC 是通过一个基于毫米波雷达技术的传感器进行距离测量的。系统同时测量本车辆与视野范围内几个物体的距离以及沿车辆纵轴向的相对车速。通过这些测量值,计算出每个物体与其视野范围中心线的角度偏差(方位角)。该雷达技术依靠电磁波工作,该波以光速 c 进行传播。频率为 f 的波运行一个周期需要一个波长 λ,自动车距控制传感器的发射频率为 f=76.5 GHz,其波长 λ=3.92 mm。频率范围约为 30 GHz 到150 GHz 的波称为毫米波。
二、功能描述

如果装备 ACC 的车辆行驶速度达到 30km/h 以上时(图 3),ACC 开始介入工作状态。在当前车速(见图3 左),如果传感器检测范围内没有车辆,则保持设定车速行驶。如果车辆前方遇到一辆慢车行驶在同一条车道上(图 3 右),则发动机降低扭矩,如果有必要,车辆采取柔和的制动措施,以此将两车车距调节到驾驶员预设的值,该值为受时间控制的值。制动介入是通过 ABS 液压泵的方式,出于计算的原因,只能选择同方向行驶的车辆作为参考。
")
")
")
")

