・上一文章:从车身结构谈汽车安全(一)
・下一文章:检修长虹CHD29155型彩色电视输入TV、AV、VGA、HDTV信号时,图像出现“马赛克”
一、四轮定位仪
1. 概述
四轮定位仪是一种对整车方向性进行检测调整的设备。车辆经过四轮定位仪检测调整后,在行驶过程中,车轮行走轨迹会在一定范围内保持直线,并具有良好的着地性和操控性,不会出现跑偏现象。这关系到车辆行驶,特别是高速行驶车辆的可控制性和安全性,并会减少轮胎磨损,所以四轮定位检测调整是保证整车生产质量的关键环节。
四轮定位仪一般可以对以下项目进行检测调整。
①前束:测试和调整前束,包括前轮前束、前轮总前束、后轮前束和后轮总前束等。
②外倾:测试和调整车轮外倾角,包括前轮外倾和后轮外倾等。
③主销倾角:由于轿车没有主销,这个主销是虚拟的,可以测试主销后倾角和主销内倾角。
④最大车轮转向角。
⑤推力角:反应整车中轴线和前进方向一致性的参数。
⑥方向盘水平调整。
目前,在汽车总装检测线使用的四轮定位仪,主要测试前后轮的前束、外倾,并计算推力角,同时校正方向盘。在需要时,可以选择测试主销倾角和最大转向角。
2. 四轮定位参数的定义
汽车定位是按以下参照线(图1)为基准来进行定位的。
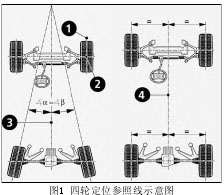
① 轮中心线:轮胎与地面接触形成的一条直线,垂直于这条线的直线即为车轮中心线。
②车轮接触点:车轮中心线与车轮旋转轴的交点。
③几何轴线(推力线):后轴总前束的中心线,对于前轮的测量与此轴有关,它同时也是汽车直线行驶的延伸的轴线。后轴的前束是以前面中心对称面为基准测出的。几何轴线由后轴前束决定,也是车辆行驶时的推力线,也是前轮前束的测量基准。
④车辆中心对称面:这是汽车几何中心平面,它垂直于行驶平面并通过前后轴的轮距中点,是后轮前束的测量基准。
3.四轮定位仪的基本测量机构
(1)四轮定位仪测量的分类
四轮定位仪的精度主要取决于测试方法和测试机构,且二者有密切的关联。按照测量结构和测量方式的不同,四轮定位仪大致有以下几种分类。
①接触式测量:使用探头式差动变压器,测量车轮的端面高度变化。
②非接触式线激光传感器:使用线激光加CCD图像分析,测量车轮的端面高度变化。
③3D激光测量单元:采用3D激光、摄像测试技术。
非接触式激光传感器和3D激光测量单元是目前流行的测量方式。
(2)非接触式线激光传感器测量原理
①二传感器形式:两个传感器测量车轮的X、Y方向位置信息。先是在水平位置进行一次检测,然后传感器支架回转90°,再测量Y方向。两次测量的结果作为车辆调整的依据。调整结束后,将再次用同样方法检测车辆轮胎,不合格再次调整,直到合格为止。
②三传感器形式:用三个传感器进行测量,传感器成品字形布置,分别处于钟表9点、12点、3点钟位置。3点、9点传感器用来测量X方向的轮胎位置数据,上面的12点传感器和底下两个的中点连线,用来测量轮胎Y方向的位置数据。
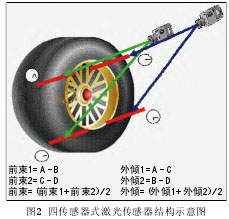
③四传感器(图2)。
(3)D激光测量的原理
①3D激光传感器。图像处理系统根据测量数据进行处理,得出需要的数据(见图3)。
② 轮胎轮廓线基本算法
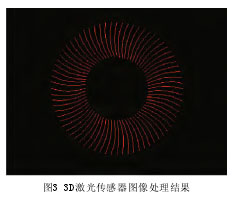
系统需要根据所得图像得出轮胎轮廓线,方法如下。
首先,测取车轮轮胎轮廓线,激光系统通过发射激光及接收激光的方式,测量车轮轮廓。通过连续的光束,读取并用计算机模拟出车轮轮胎轮廓。这个轮廓包括车轮边沿及车轮本身的毛刺、字迹等“扰动”成分,这是必须处理的。
接着,提取高点附近的计算区段。通过轮胎壁过滤算法(经过过滤平滑处理,以消除轮胎变形、毛刺及字母影响)、轮胎边缘跳动补偿(去掉轮胎边缘及周期性的跳动)等处理方式,提取高点附近的一个区段的十几个点的数据,进行后续运算。
最后,计算最高点,从距离数据上筛选出最高点。
③三线式前束、外倾的基本计算
首先计算前束:假设L是高点到激光头的距离,D是轮胎测试圆直径,Toe是前束,Cam是外倾,“前”、“后”(9点钟、3点钟)指前后激光传感器。那么,每次采集后计算的前束值可用公式表述为:Toe0=arctan[(L前-L后)/D]。
如果方向盘转角θ不为零,则还要根据传动比λ把方向盘对前束的影响折合成一个角度θ0,总前束的计算即:θ0=θ·λ。实际前束为:Toe =Toe0-θ0 =Toe0-θ·λ。
接着计算外倾:假设3、9点钟传感器测量到的轮胎高点连线的中间点平均距离为L。那么,Cam=arctan[2(L下-L上)/D]=arctan{2[(L前 + L后)/2 - L上]/D} 。其中,L下=(L前 + L后)/2。
在工人调整时,整个测量过程是动态的。测量结果可以动态显示在屏幕上,直到操作者调整合格为止。
")
")
")
")

