・上一文章:宝马525i VANOS动力不足故障
・下一文章:分析汽车排放超标的原因及如何修复 (下)
二、车距自动调节装置
车距自动调节装置(ADR)也被称为自适应巡航控制系统(Adaptive CruiseControl,ACC),带有双雷达和前车距离控制系统,是常规定速巡航装置(GRA)的一项扩展功能。
(一)系统描述
车距自动调节装置可以将车辆速度调节到驾驶员事先设定的数值,包括在路面无其他车辆时(30~250km/h)和在跟随其他车辆行驶时(0~250km/h)。车距自动调节装置还能确保车辆与前车保持安全距离,这个距离可以由驾驶员选择。在这个过程中,系统确保车辆本身的速度与前面车辆的速度协调一致,与前车的间距可以在四个等级(约1~2.5s)中进行调节(图4)。此外,系统还可以为驾驶员提供标准、舒适和动态三个行驶程序,在路面无其他车辆行驶时,可以加速到期望的速度。如果在车道上发现一辆行驶缓慢的车辆,系统会以适当的间距跟随前车行驶。

摄像头车道识别功能、导航系统路段数据以及通过两个前置雷达的帮助,对静止和前方行驶车辆的识别功能,改进了车辆对车道走向的评估。在使用转向信号灯时,系统可以识别到超车要求,并在考虑后方交通状况的情况下改进系统动态性能。
1.停车/起步(Stop&Go)功能
如果前方行驶的车辆开始减速直到停止行驶,途锐会自动制动并停在该车后方。如果前方车辆在3s内重新启动行驶,途锐同样会跟随自行起步。如果停车的时间超过3s,驾驶员可以按下转向柱开关上的RES按键,在15s内激活车辆并自动跟随前方行驶的车辆前行。开启跟车功能(按下RES按键,两辆车静止时),可自动紧跟前车行驶。
2.前车距离控制系统
途锐的前车距离控制系统不仅是带有警告功能的辅助系统(预防发生追尾碰撞),在第三代系统中还提供了车辆制动功能(同样在无驾驶员介入的情况下)。这些功能有助于降低事故的严重程度,在特定的边缘条件下(取决于车速)可以避免事故的发生。
自动紧急制动功能(ANB)是通过制动距离缩短装置AW V3实现的。A M V3与制动距离缩短装置AWV1和制动距离缩短装置AW V都是前车距离控制系统的组成部分。
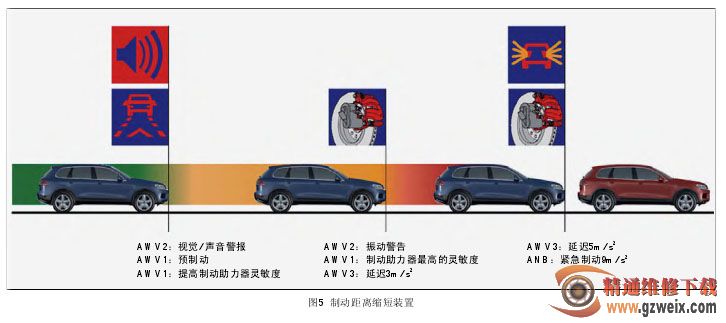
3.制动距离缩短装置AWV3
在制动距离缩短装置2发出振动警告后,系统会将反应时间延迟至3m/s2。如果驾驶员没有充分进行制动,则系统会提供制动支持。如果驾驶员根本没有反应,系统会将延迟时间提高到5m/s2。如果无法避免与前行的车辆发生碰撞,系统会在后方交通状况允许的情况下以9m/s2的全减速方式进行紧急制动。由此可以将车速降低40km/h,避免发生严重的交通事故。在减速期间通过报警信号(报警灯应急闪烁)提醒后方车辆注意,其控制过程如图5所示。
(二)系统结构
车距自动调节装置是系统功能一个突出的亮点。此系统最多可连接27个控制单元,确保舒适度和安全性的提升。2011款新途锐的车距自动调节装置的创新之处不仅在于此辅助系统具有在多个控制单元上的分布式功能,而且辅助系统还可以将完全不同的任务委托给调节装置进行。另外,系统还包括换道辅助系统雷达传感器、多功能摄像头系统、在车道保持功能中使用的其他装置以及停车距离控制系统的超声波传感器。所有部件和系统都用于对车辆前后空间进行监测和对可能出现的障碍物进行识别,以下将进行简单的描述。
1.超声波传感器
超声波传感器的信号在“停车/起步功能”中用于车辆的再次启动。
2.多功能摄像头系统
多功能摄像头系统作为冗余信号的“发射器”,用来检查前方雷达传感器的信号是否真实。此外,系统还弥补了超声波传感器和雷达传感器之间的监测盲区。通过为ACC和AVVV3功能提供的视域距离为60m的摄像头系统及导航数据(无视域限制),不仅可以减少相邻车道的干扰,而且可以更好地预测道路行驶情况以及给出车道数量信息。通过彩色摄像头可以更好地识别路面标记(包括国外的其他颜色路面标记)。
3.前方雷达传感器

前方雷达传感器位于雾灯旁边,其安装位置如图6所示。该传感器属于第3代雷达传感器,具有以下特征:①传感器中集成有4个雷达天线单元;②按照远程传感器原理工作,发射频率为77GHz;③内置的传感器加热装置的工作温度范围在-5℃~+5℃之间;④雷达传感器工作范围为200m;⑤水平方向上的探测角度为40°。
随着新一代雷达传感器的使用,可以检测到车辆前方大约30m处、总宽度为3个车道的相关路面情况。
")
")
")
")

