・上一文章:佳能PC -25型静电复印机,“预热”指示灯不亮,不工作
・下一文章:谈发动机噪音大的诊断技巧
五、区域全景显示系统
大众汽车公司首次在2011款途锐中应用区域全景显示系统(Area View),该系统基于摄像头所处的环境进行检测,属于A级和B级倒车摄像头的扩展。在倒车摄像头采集车辆后方区域图像期间,驾驶员可以通过区域全景显示系统了解车辆周围的情况。它为驾驶员提供了大量的可视视图和设置模式,驾驶员可以有目的地根据道路交通情况及其所期望得到的信息进行选择。
1.区域全景显示系统结构
该系统通过4个摄像头(隐蔽地集成在车辆中)可以实现车辆周围区域的全景再现,如图15所示。前置摄像头位于前格栅内,倒车摄像头安装在行李箱盖的把手按键内,侧面摄像头安装在侧面后视镜下方。
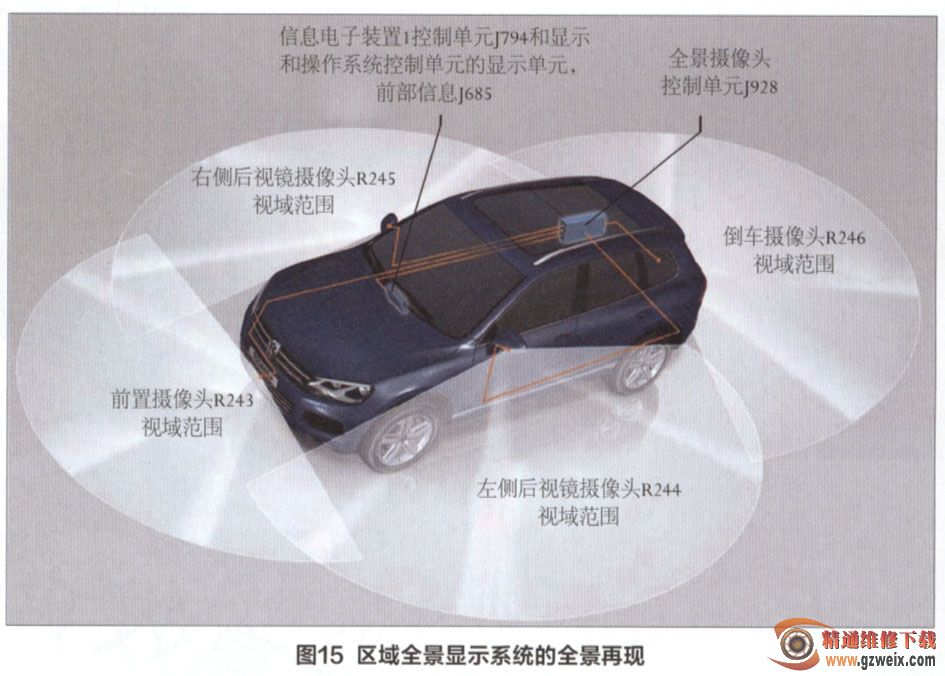
全角度摄像头可以采集车辆周围区域的所有图像,可以观察到之前无法检测到的车辆周围的盲区。由于摄像头存在重叠的观测区域,因此可以在相邻摄像头视域范围之间形成一个准确并且逼真的虚拟过渡区(即鸟瞰视图),系统根据倒车影像系统地诊断地址码(6Chex)。
2.网络连接
4个摄像头通过日SD(高速数据)导线连接到周围区域摄像头控制单元上,其网络连接情况如图16所示。这些导线为摄像头提供电源并控制摄像头,通过LVDS(低电压差分信号)对视频信号进行数字传输。

通过一条同轴电缆,在区域摄像头控制单元和信息电子装置1控制单元之间建立连接(FBAS彩色图像消隐和同步信号),FBAS连接的数据传输速率约为6Mbit/s 。区域摄像头控制单元涉及其他控制单元的众多信号,其所获得的信号由区域摄像头控制单元进行虚拟显示,不会对其他系统产生作用或影响(如显示转向角度的动态虚拟辅助线)。
(1)VGA摄像头
区域全景显示系统提供了4个广角摄像头(见图17),其具有以下技术特征:①分辨率比较高,为640X480像素(VGA分辨率);②水平方向上的探测角度为1900(较大的半空间);③用1/4英寸CMOS成像芯片作为传感器;④工作温度范围为-40~85℃。

(2)区域摄像头控制单元J928
该控制单元的外形如图18所示,控制单元的任务是对摄像头提供的图像进行处理,以便显示在RNS850的显示屏上或以后配备的收音机RCD550显示屏上。处理过程包括对图像进行矫正、换算或调整到相应的视角以及显示静态和动态的虚拟辅助线。
")
")
")
")

