・上一文章:佳能PC -25型静电复印机,“预热”指示灯不亮,不工作
・下一文章:谈发动机噪音大的诊断技巧
区域摄像头控制单元包括一个用于过程控制的微控制器和一个用于对图像进行处理的600MHz DSP(数字信号处理器)。
3.区域全景显示系统的使用操作
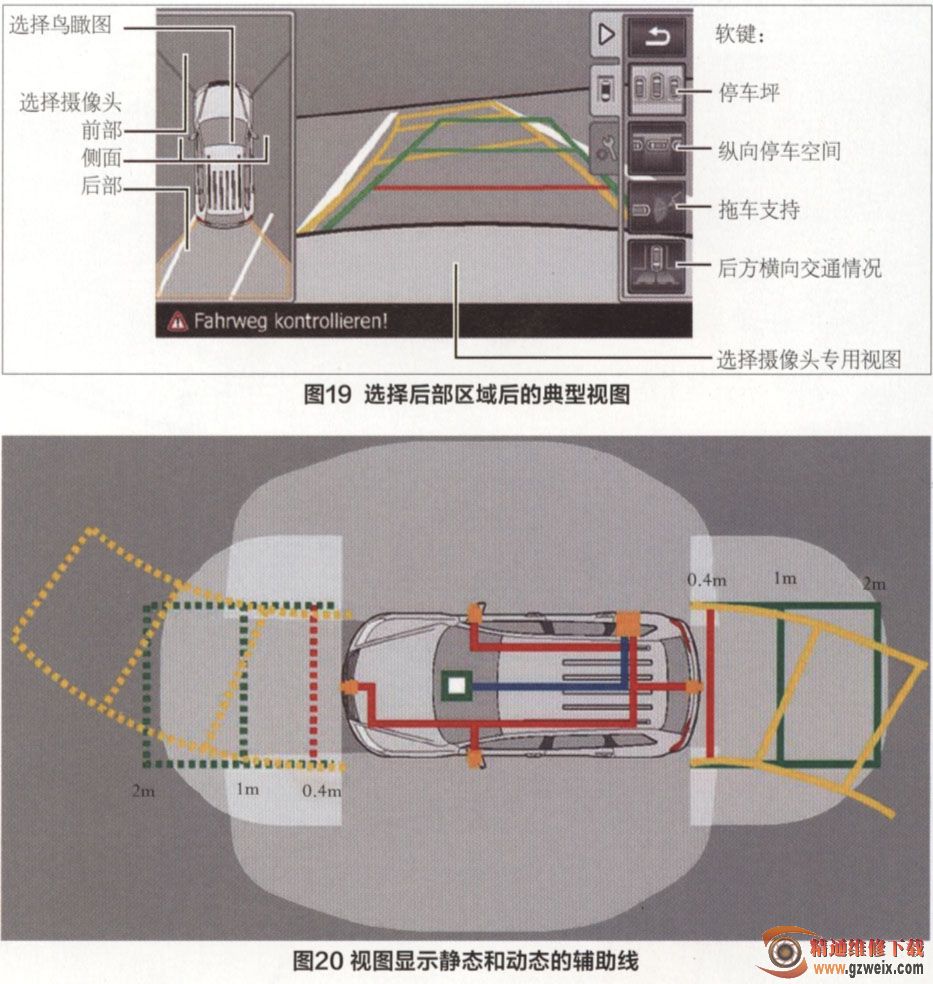
挂入倒车挡或按下停车辅助系统按键后,在带有触摸屏的收音机或导航系统显示屏上将会显示相应的视图,并且在屏幕左侧显示微型鸟瞰图,如图19所示。在微型鸟瞰图中通过触摸相应区域(车前部、后部以及左右两侧)可以选择显示详细视图。通过触摸鸟瞰图中的车顶,可以显示整个车辆的俯视图。在选择相应区域后显示屏会切换到分屏模式(分隔屏幕显示)。分屏的右侧将显示所选区域的详细视图,在第二步操作中,可以通过右侧屏幕菜单中的软键选择不同的视图,微型鸟瞰图的左侧可以选择摄像头和观察视角。
4.区域全景显示系统的功能
区域全景显示系统在车速为0~15km/h时开始运行。摄像头在启动时采集车辆周围区域的信息,所获得的图像将通过区域摄像头控制单元进行矫正,因为广角摄像头拍摄的原始图像存在严重失真的问题。视角也同样需要通过图像处理的方式调整为所需视图,最后通过修正的图像(取决于所选择的视图)设定显示距离和预测道路行驶情况的虚拟辅助线,这些经过处理的图形随后会显示在RNS850或以后配备的收音机显示屏上。
需要注意的是,如果相邻摄像头的视野重叠区域中出现图像扭曲的情况,则系统必须到维修站重新进行校准。对图像扭曲进行检查时,必须将空气弹簧底盘调整到水平高度,同时减震装置位于“舒适”位置的情况下才能进行。
(1)辅助线
根据所选择的视图显示静态和动态辅助线,通过这些辅助线可以更好地预测距离(红色或绿色辅助线),并描述与转向角有关的车道(黄色辅助线),如图20所示。
(2)显示屏上的视图
①鸟瞰视图
控制单元将4个独立摄像头的图像通过计算形成一个周围区域的总视图,并形成一个车辆上方的虚拟视图,该试图同样涉及4个摄像头视域之间的过渡区域,再次生成一个高质量图像。在该视图中还会显示一个车辆影像的俯视图,驾驶员可以从鸟瞰图(见图21)中观察其车辆周围区域的情况。
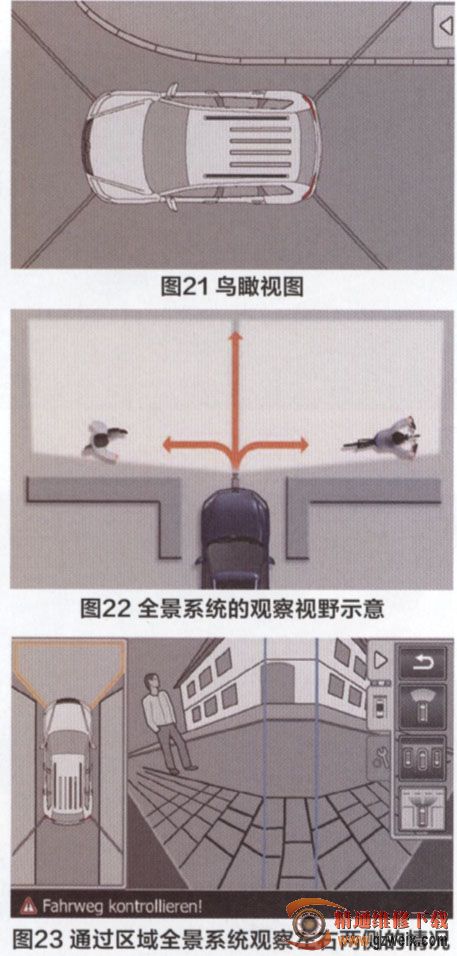
②横向交通情况视图
驾驶员通过此功能可以观察到车辆最前方的位置以及左右两侧超过90°的区域,了解道路交通情况(见图22)。虽然驾驶员实际上位于前置摄像头后大约2m的位置,但现在通过此系统可以看到左右两侧的情况,如图23所示。在能见度较差和路面较窄的情况下,区域全景显示系统可以为驾驶员提供相应的帮助。对于“后方横向交通情况”将使用后置摄像头,它可以帮助驾驶员观察车辆最后方区域的情况。
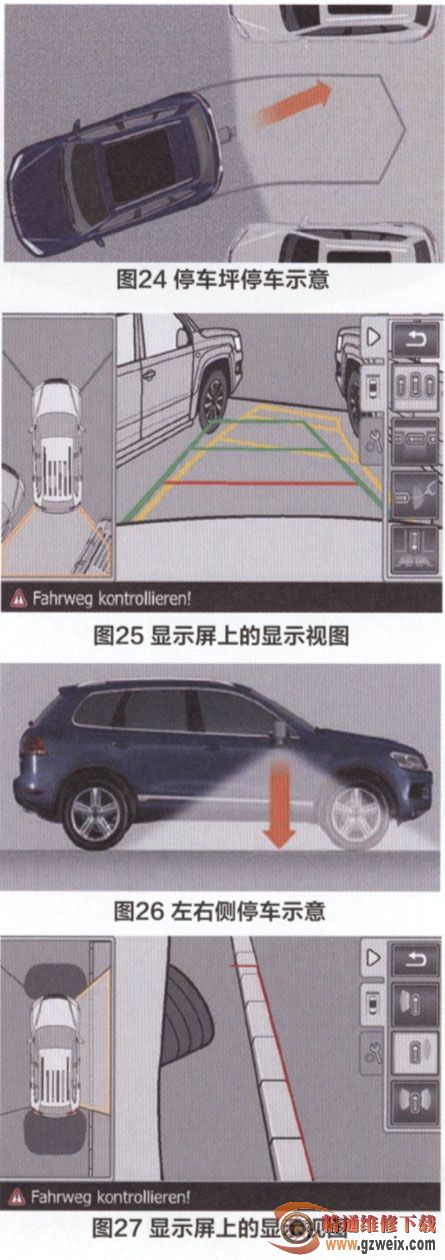
③停车坪视图
图24为驾驶员前进停车或者倒车停车提供支持,该过程需使用前置摄像头或后置摄像头。驾驶员在进行前进停车时,按下停车距离按键激活显示视图(见图25);在进行倒车停车时,挂入倒车挡激活显示视图。
")
")
")
")

